12. ROS1_ AI Voice Interaction Courses
12.1 Introduction to WonderEcho Pro and Installation
12.1.1 Introduction to WonderEcho Pro
WonderEcho Pro, also known as the AI Voice Interaction Box, is equipped with a high-performance noise-canceling microphone and a high-fidelity speaker. Featuring a USB-to-audio module, it offers plug-and-play functionality without the need for drivers and is compatible with multiple systems for both playback and recording.
This device integrates various speech processing modules and uses advanced noise suppression algorithms to effectively filter out background noise, supporting a seamless process from wake-up to speech recognition and interaction. With its modular design, each functional component—such as wake-up, detection, recognition, and synthesis—can be developed and tested independently.
Features & Parameters
(1) The device is equipped with an onboard microphone and speaker interface, supporting both audio input and output.
(2) It is driver-free, offering seamless plug-and-play functionality with broad system compatibility, including Windows, macOS, Linux, and Android. The listen/speak dual function ensures versatility across various platforms.
(3) It uses a standard USB 2.0 interface.
(4) Control Interface: USB
(5) Voice Chip Model: Cl1302
(6) Speaker Output: 3.0W per channel (4Ω BTL)
(7) Power Supply Voltage: 5V
Recording and Playback Test
Note
The following steps demonstrate the process using the Raspberry Pi 5, but the connection and testing procedures are equally applicable to other compatible devices, such as NVIDIA Jetson controllers.
12.1.2 Connection Setup and Verification
For Raspberry Pi, you can establish a remote connection to the system using VNC by following the 3. Remote Tool Installation and Docker Entry Method guide. Once connected, check the top-right corner of the desktop for the microphone and speaker icons, as shown below. If they are present, the connection has been successfully established.

For Jetson-based systems, you can use the Nomachine remote connection tool. Once connected, verify the presence of the speaker icon in the top-right corner of the system.

12.1.3 Recording Test
(1) Next, open a new command-line terminal and enter the following command to check for the use of the -l (lowercase L) option, and verify that the card number (card) is 0. This is just an example; please ensure to check your actual query results.
arecord -l
(2) Then, use the following command to start recording, replacing the highlighted card number (in red) with the one obtained from the previous query:
arecord -D hw:0,0 -f S16_LE -r 16000 -c 2 test.wav
(3) A test.wav file will be generated in the current folder.
(4) You can record for about 5 seconds, then press Ctrl+C to stop the recording.
12.1.4 Playback Test
(1) After completing the recording, you can check if the file was successfully recorded by running the following command in the current directory:
ls
(2) If test.wav appears, the recording was successful. To play the recorded file, use the command below, ensuring you replace the card number with the one obtained from your previous query:
aplay test.wav
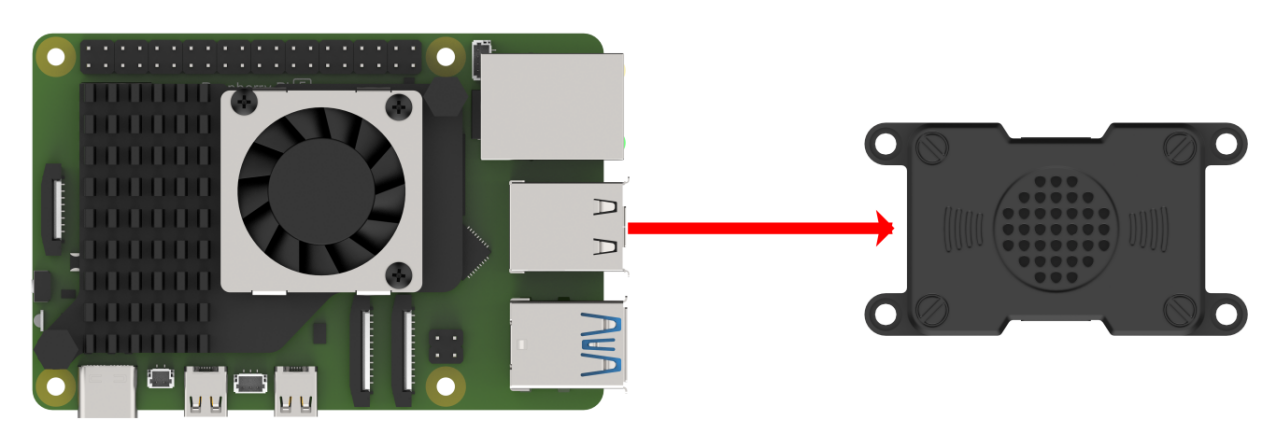
12.1.5 WonderEcho Pro Installation
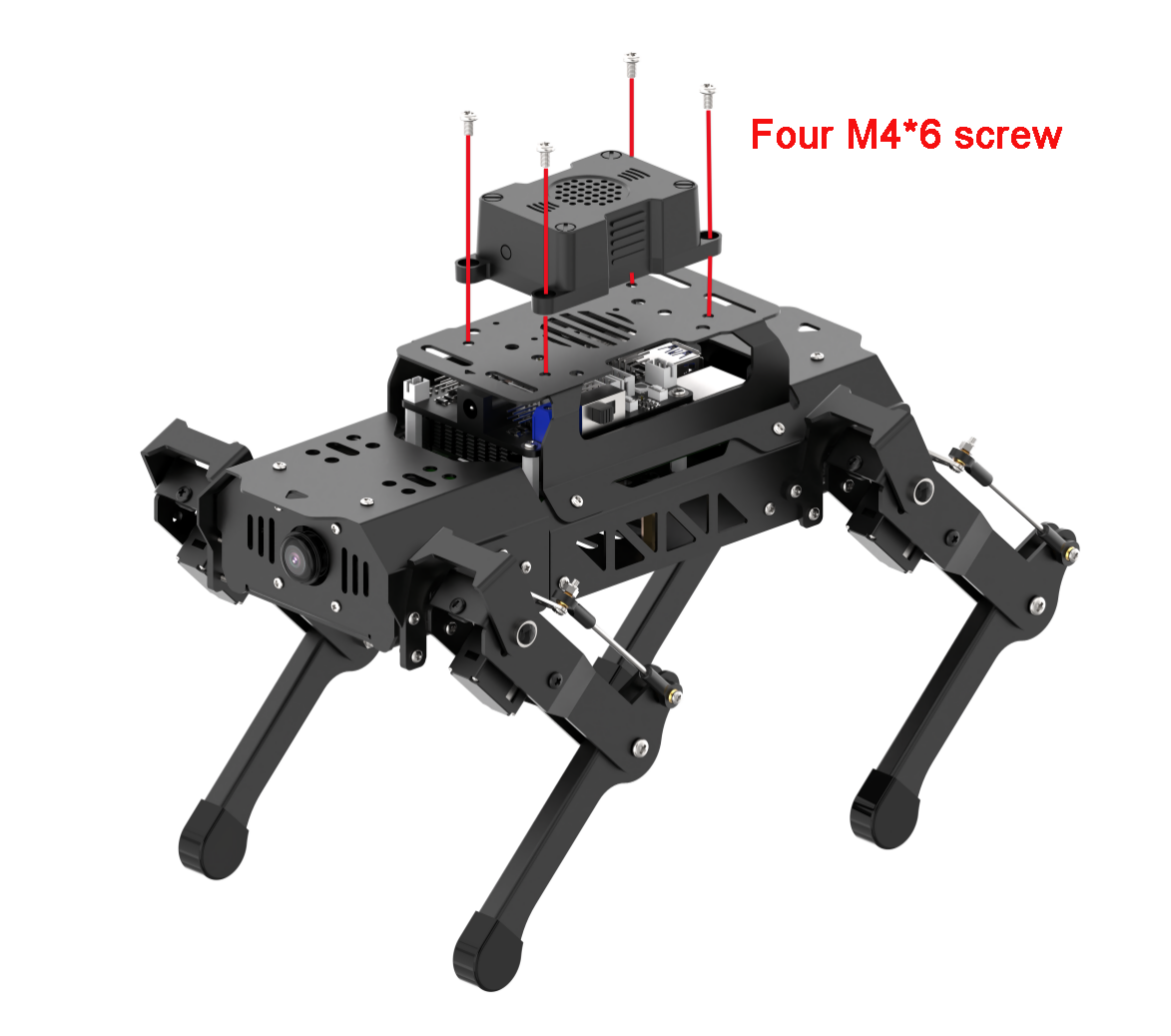

Connect the WonderEcho Pro to the port 2.

12.1.6 Firmware Flashing Method
In this lesson, we will learn how to flash firmware onto the WonderEcho Pro.
Flashing the Firmware
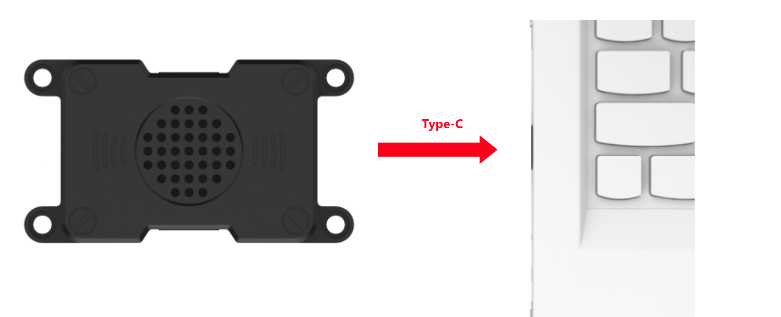
(1) Begin by connecting the WonderEcho Pro to your computer using a Type-C data cable.
(2) Navigate to 05 Appendix\Firmware Flashing Tool and open the PACK_UPDATE_TOOL.exe file. Select the CI1302 chip from the list, then click “Firmware Upgrade” to begin the process.

Note
For this example, we will use the hello hiwonder firmware (Wake word: hello hiwonder).
(3) Select the firmware by locating the hello hiwonder firmware (Wake word: hello hiwonder).bin file under the 05 Appendix path.

(4) Identify the correct COM port and select it.
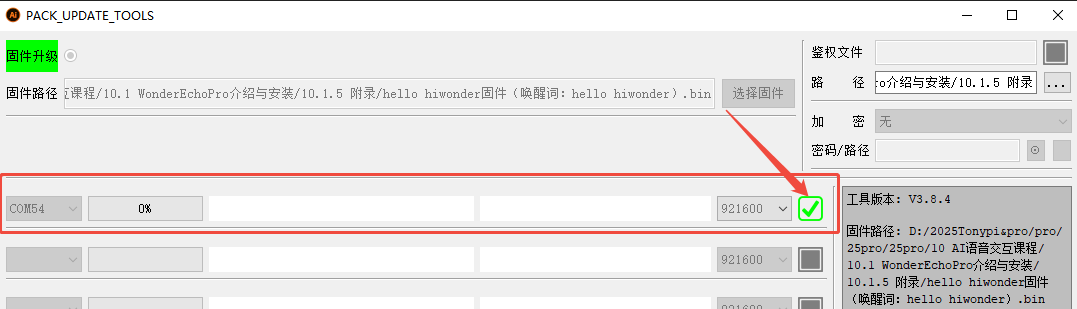
(5) Press the RST button on the WonderEcho Pro to initiate the flashing process. Wait for the process to complete successfully.


Testing the Wake Word
After flashing the firmware, follow the steps in Appendix\ Serial Port Debugging Tool to install the serial port debugging tool. Then, follow the steps below to test whether the firmware is functioning correctly.
(1) Connect the WonderEcho Pro to your computer’s USB port using a Type-C to USB adapter.
(2) Open the Serial Port Utility, select the connected COM port (including CH340), and set the baud rate to 115200, as shown in the image below.
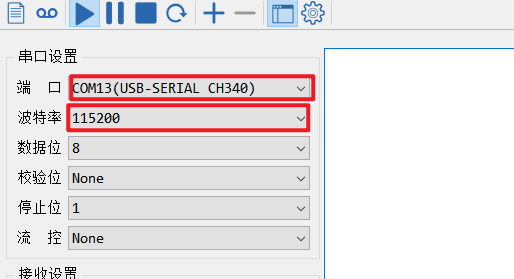
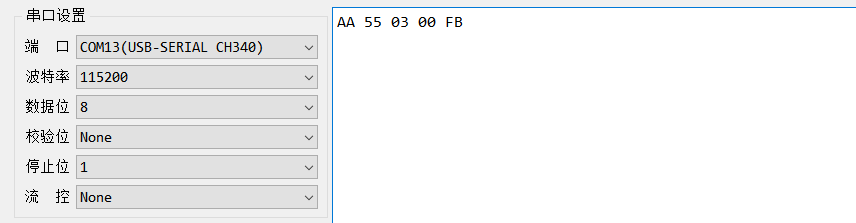
(3) Say the wake word hello hiwonder as configured in the firmware settings. The corresponding flag information will appear on the right side (in hexadecimal format), confirming that the wake word was successfully recognized.

12.1.7 Firmware Development
In this lesson, you’ll learn how to create and flash firmware for the WonderEcho Pro module.
Firmware Creation and Flashing
Note
We’ll use HIWONDER as an example to demonstrate the firmware creation process. The same procedure also applies to creating firmware with Chinese wake words. Note: English wake words must be entered in all uppercase letters to function properly.
(1) Open the official firmware creation website: https://aiplatform.chipintelli.com/home/index.html; The platform interface is in Chinese. If needed, use your browser’s translation feature to switch to English for easier navigation.
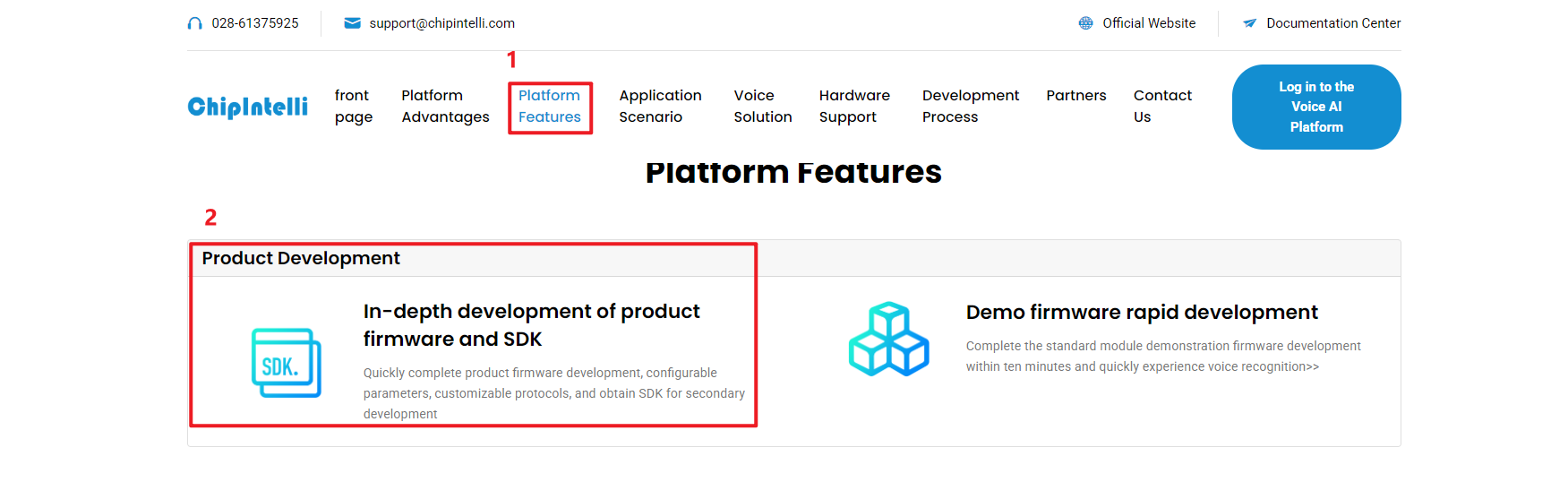
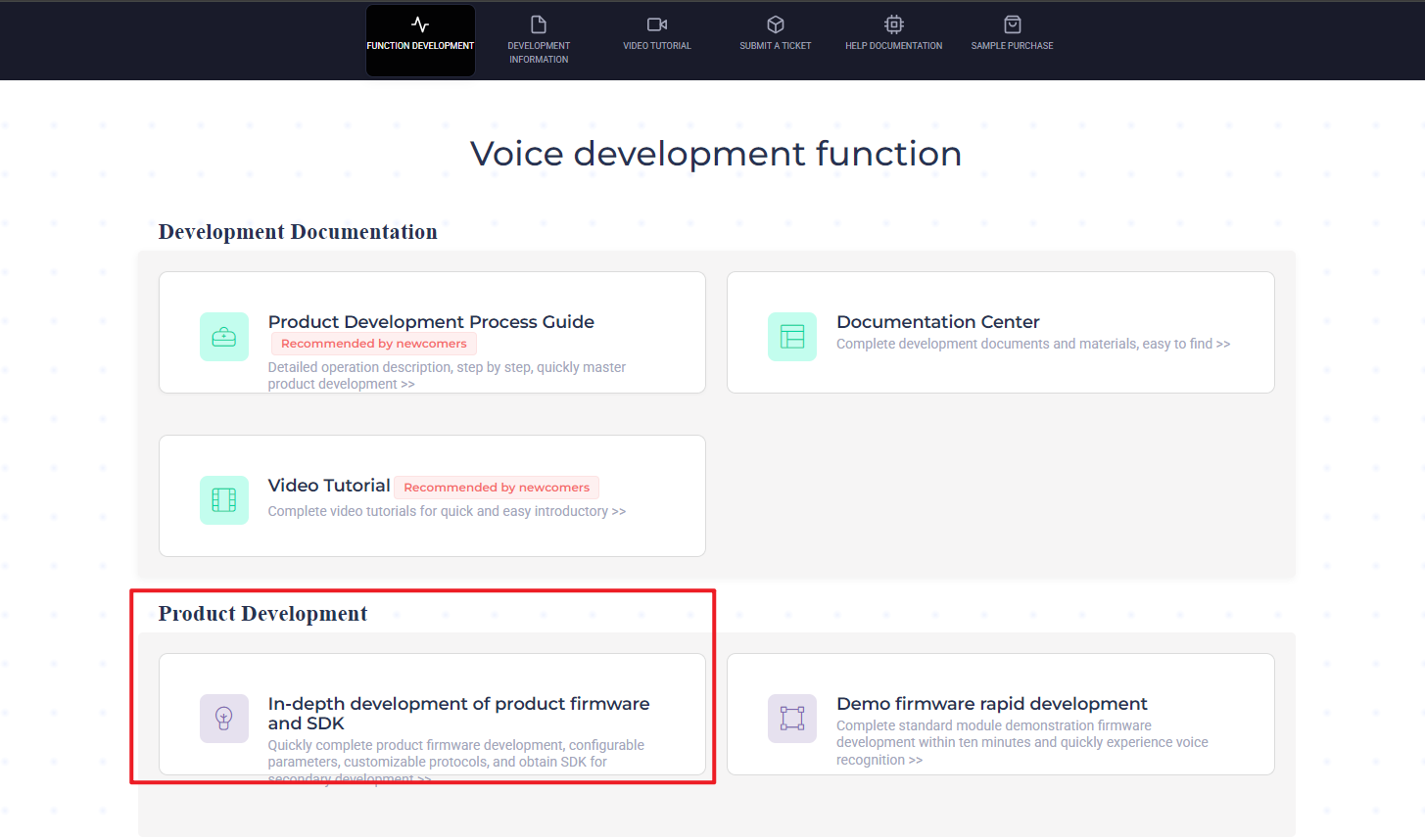
(2) First, visit the ChipIntelli Voice AI Platform by clicking on Platform Features in the top menu, and then select In-depth development of Product Firmware & SDK under the Product Development section.
(3) You will be prompted to log in. (Note: Currently, registration is only available for mainland China mobile numbers. For international users, we provide a shared account: Username: 18033085495 Password: hiwonder
After successfully logging in, click In-depth development of Product Firmware & SDK again to access the development section.
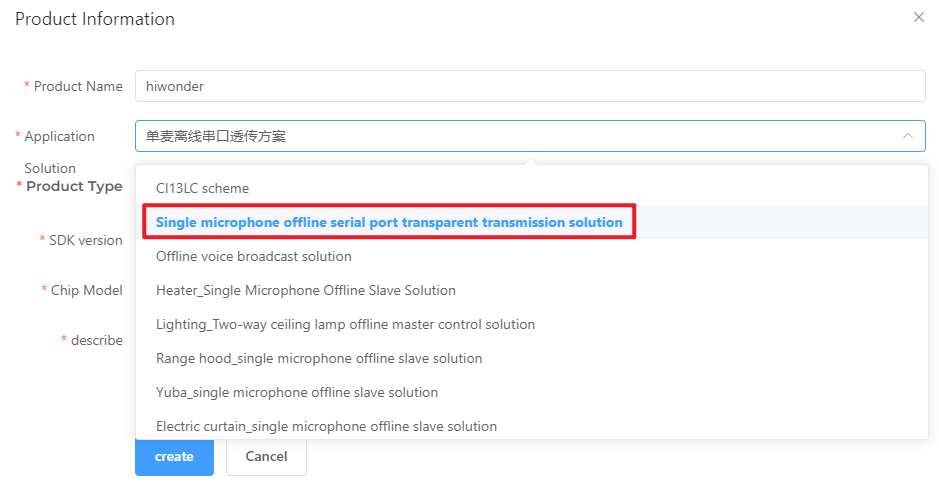
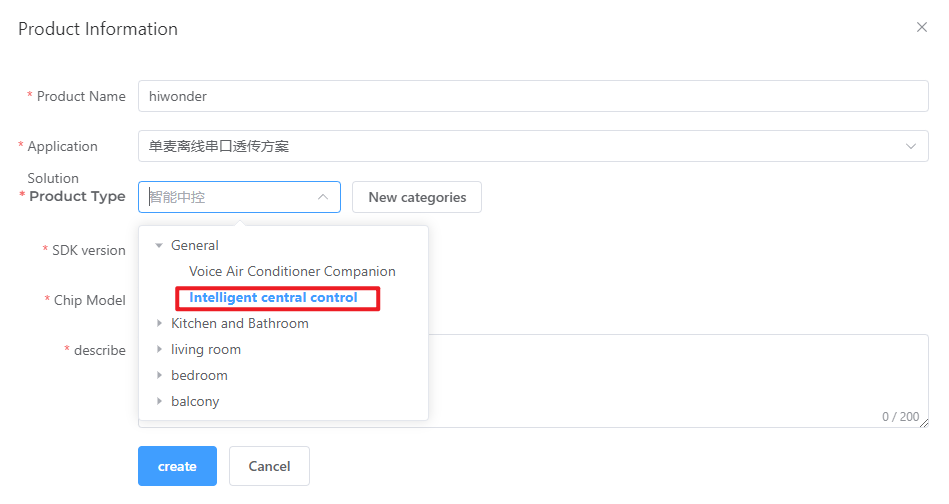
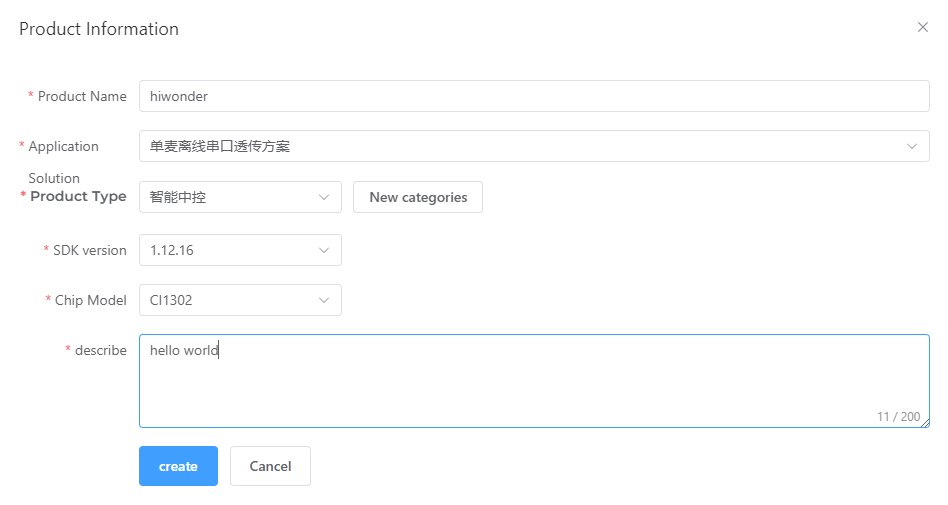
(4) To create a new product, click the option in the left sidebar. You will be asked to provide a Product Name and a Description, both of which can be customized. For the other fields, follow the options shown in the red box. Specifically, choose Product Type: 通用 (General) → 智能中控 (Smart Central Control). After completing these steps, click Create.
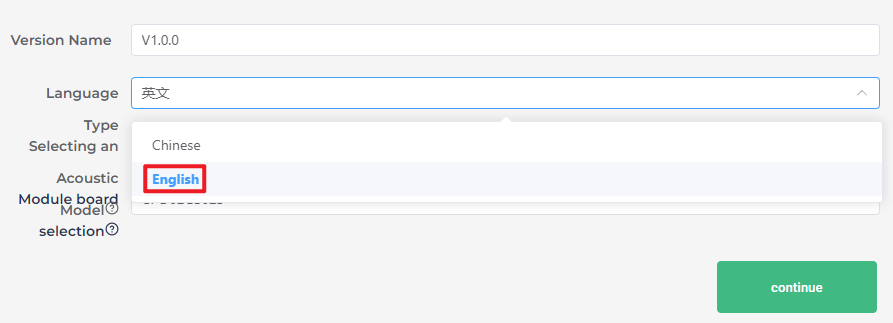
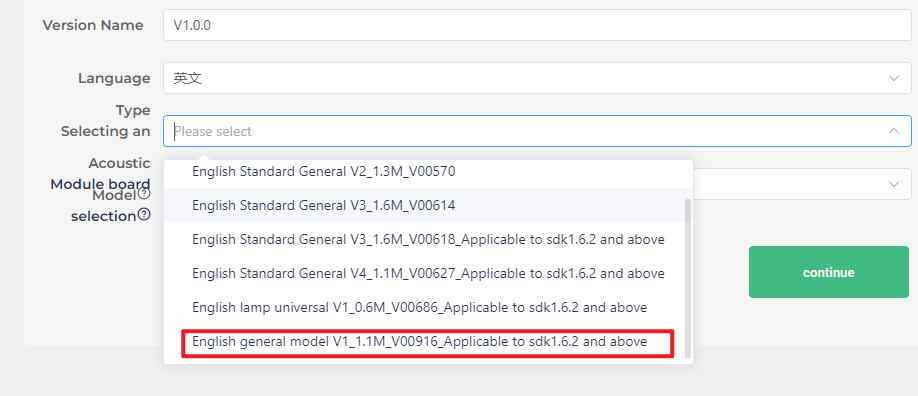
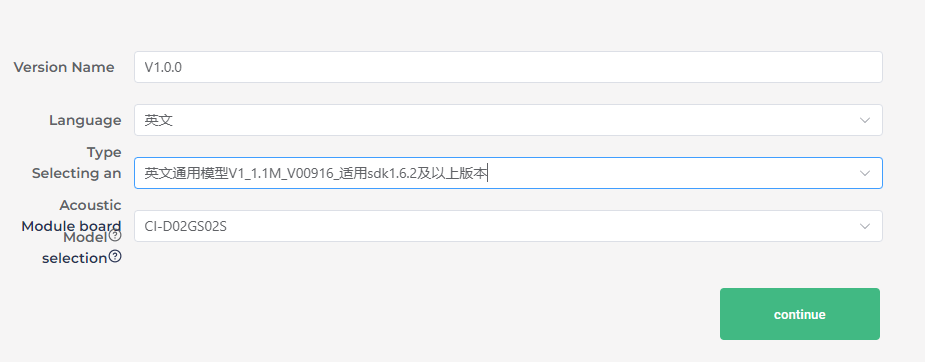
(5) Next, you will need to set the project language. Since we are configuring for English voice recognition, select English under Language Type. If you were configuring for Chinese recognition, you would select Chinese for both Voice Type and Acoustic Model. Once you’ve selected the appropriate options, click Continue to proceed.
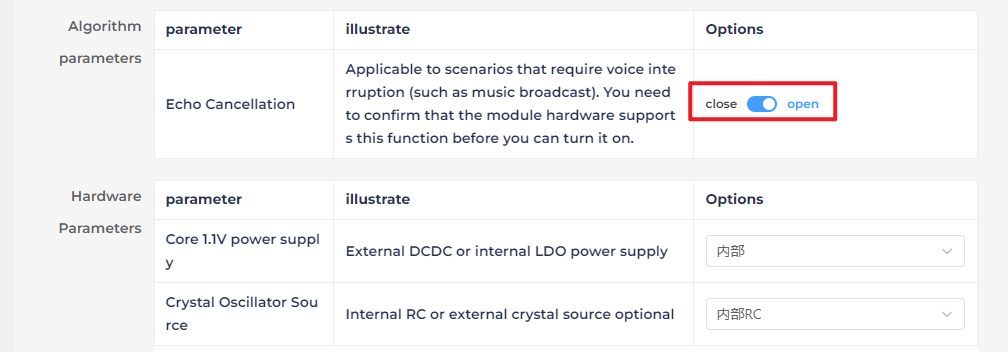
(6) In the firmware configuration interface, you will make some important changes to the settings. Start by enabling the Echo Cancellation feature under Algorithm Settings.
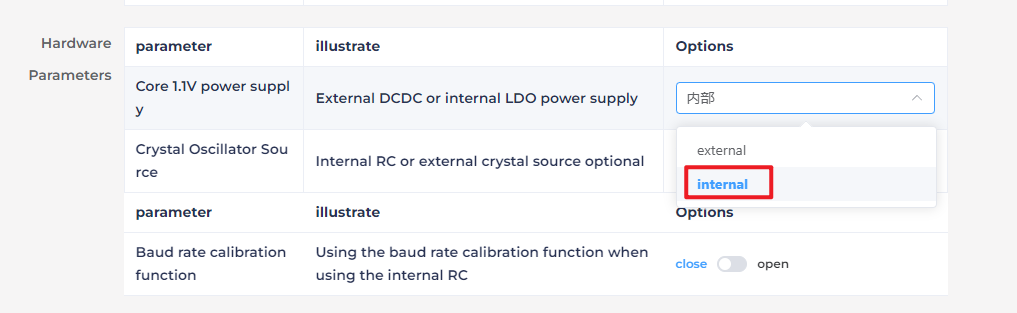
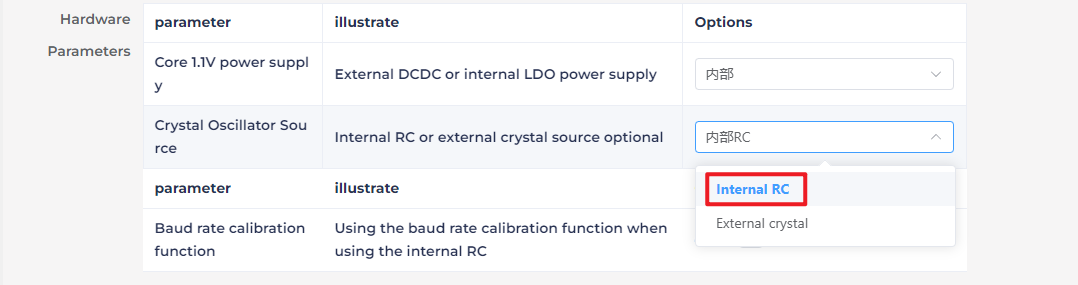
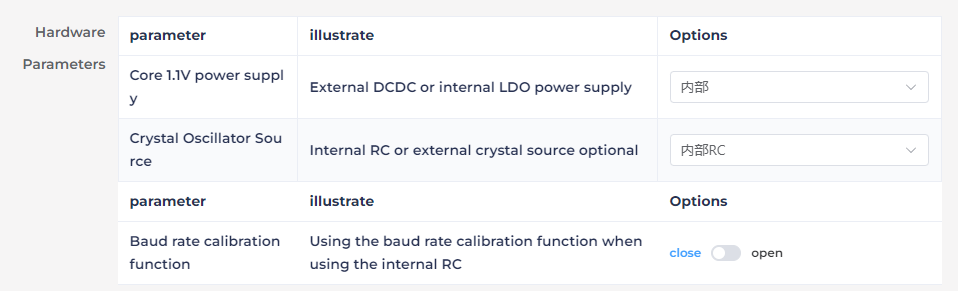
(7) Under Hardware Settings, set the oscillator source to Internal RC and disable the Baud Rate Calibration function.
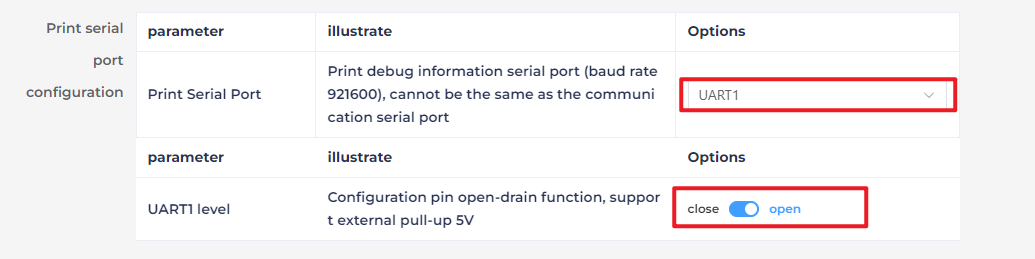
(8) In the UART Print Settings, configure UART1 to Open-Drain Mode, supporting external 5V pull-up.
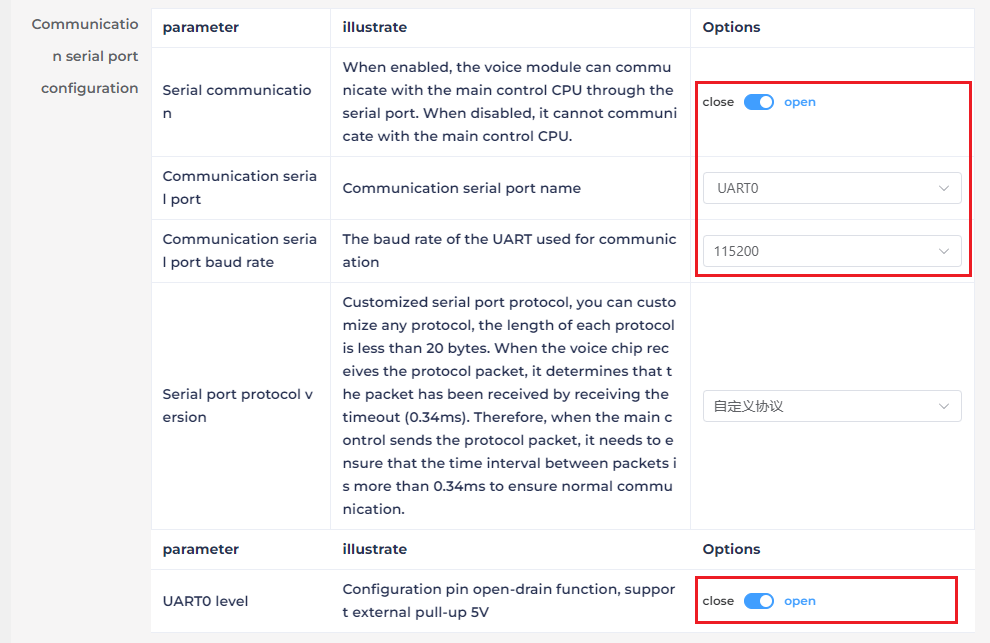
(9) For Communication UART Settings, set the Baud Rate to 115200 and configure UART0 to Open-Drain Mode, also supporting external 5V pull-up. After adjusting these settings, click Continue to move forward.
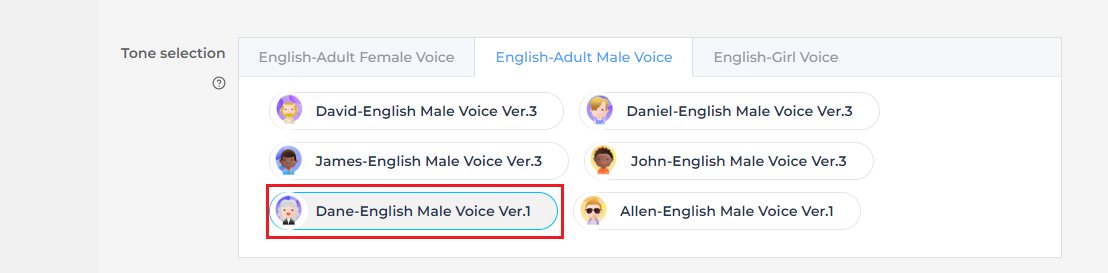
(10) The next step involves configuring the command words. You will need to choose a voice output for the wake-up command. For this example, select Dane – English Male Voice as the output voice. (If you’re using Chinese as the language, you may choose the voice option Chengcheng – Standard Boy Ver.1. The selection between Chinese and English voices is determined by the language settings configured in Step 5.)

(11) Next, upload the command word configuration file. Navigate to the folder Wake Word Protocol List and locate the spreadsheet titled Command Phrase and Playback Protocol List V3 – English Template. Simply drag and drop the file into the upload area on the webpage.
Note
If you wish to change the wake word, open the spreadsheet and replace the default wake word HIWONDER with your preferred word. Keep in mind that the English version of the firmware only supports English wake words, and mixed-language wake words are not allowed. Additionally, English wake words must be written in uppercase letters to function properly.


(12) After uploading the file, you will see the command data populated in the table below.

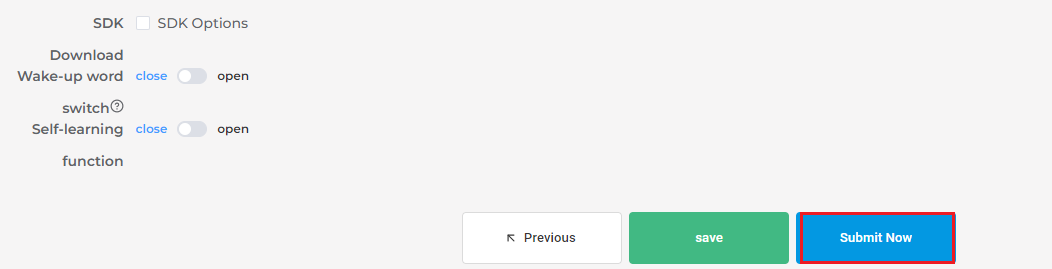
(13) Click Submit and wait a few minutes for the firmware generation process to complete. Once finished, click Download to obtain your customized firmware.


12.2 Voice Recognition
12.2.1 Preparation
Refer to 12.1 Introduction to WonderEcho Pro and Installation to flash the firmware onto the WonderEcho Pro module. Once the firmware has been successfully burned, install the module onto the robot.
By default, the wake-up word for the WonderEcho Pro factory firmware is Hello, HiWonder. If you wish to change the wake-up word to PuppyPi, please refer to the tutorial titled 12.1.6Firmware Flashing Method for step-by-step instructions.
12.2.2 Brief Game Instructions
The program receives data from the the WonderEcho Pro through the serial port and changes the RGB LED colors according to the recognized voice commands.
12.2.3 Starting and Stopping the Game
Note
When entering commands, ensure that case sensitivity is strictly followed. You can use the Tab key to auto-complete keywords.
(1) Power on the robot and remotely connect to the Raspberry Pi desktop via VNC.
(2) On the Raspberry Pi desktop, double-click the Terminator icon  to open the command-line terminal and enter the ROS1 development environment.
to open the command-line terminal and enter the ROS1 development environment.
(3) Execute the following command to disable the app service:
~/.stop_ros.sh
(4) Type the command and press Enter to start the low-level control node.
roslaunch ros_robot_controller ros_robot_controller_node.launch
(5) Open a new terminal window, enter the following command, and press Enter to switch to the directory where the program is located.
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(6) Enter the following command and press Enter to initiate the program:
python3 ASR_detect_demo.py
(7) To exit this feature, simply press Ctrl+C in the terminal. If the command does not stop the program, please try again.
(8) Click the icon in the top-left corner of the Raspberry Pi desktop to open the terminal. Next, enter the command and press Enter to enable the mobile app’s auto-start service.
sudo systemctl restart start_node.service
12.2.4 How It Works
Note
The wake-up commands vary depending on the firmware installed. If you are using the Chinese Xiaohuan Xiaohuan firmware, please use the Chinese commands below. For PuppyPi or Hello HiWonder firmware, use the English commands provided.
| User Command | Terminal print | Actions |
|---|---|---|
| puppypi | AA 55 03 00 FB | |
| RED-LIGHT | AA 55 00 8A FB | Red light on |
| GREEN-LIGHT | AA 55 00 8B FB | Green light on |
| BLUE-LIGHT | AA 55 00 8C FB | Blue light on |
| TURN-OFF-THE-LIGHT | AA 55 00 09 FB | Turn off the light |
Note
Once the program is running, simply say Puppy to activate voice recognition. After activation, you can control the RGB LED on the Raspberry Pi expansion board by speaking color commands—for example, saying red light will change the LED to red, while green light or blue light will switch it to green or blue, respectively. If there’s no voice input for over 15 seconds, the system will automatically enter sleep mode. To wake it up, just say PuppyPi again.
12.2.5 Program Download
12.2.6 Brief Program Analysis
Library Files Import
4 5 6 7 8 9 10 11 | import os import time import rospy import serial import binascii from std_srvs.srv import Trigger from std_msgs.msg import String, Bool from ros_robot_controller.msg import RGBState, RGBsState |
RGB Light Settings
Turn off the RGB light Display the RGB light control function
26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 | def turn_off_rgb(): led1 = RGBState() led1.id = 1 led1.r = 0 led1.g = 0 led1.b = 0 led2 = RGBState() led2.id = 2 led2.r = 0 led2.g = 0 led2.b = 0 msg = RGBsState() msg.data = [led1, led2] rgb_pub.publish(msg) rospy.sleep(0.01) def set_rgb_show(r, g, b): led1 = RGBState() led1.id = 1 led1.r = r led1.g = g led1.b = b led2 = RGBState() led2.id = 2 led2.r = r led2.g = g led2.b = b msg = RGBsState() msg.data = [led1, led2] rgb_pub.publish(msg) rospy.sleep(0.01) |
Function Execution
The system selects the appropriate color based on the recognition result returned by the WonderEchoPro module.
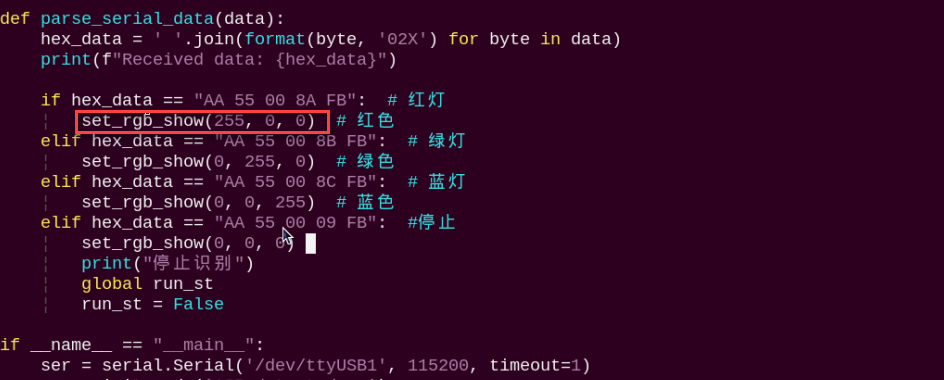
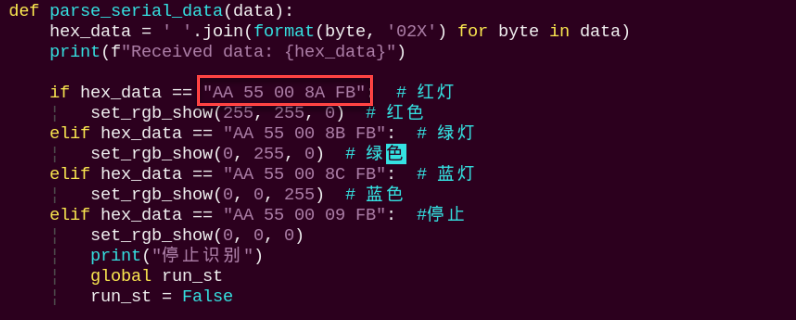
66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 | def parse_serial_data(data): hex_data = ' '.join(format(byte, '02X') for byte in data) print(f"Received data: {hex_data}") if hex_data == "AA 55 00 8A FB": # Red light(红灯) set_rgb_show(255, 0, 0) # Red(红色) elif hex_data == "AA 55 00 8B FB": # Green light(绿灯) set_rgb_show(0, 255, 0) # Green(绿色) elif hex_data == "AA 55 00 8C FB": # Blue light(蓝灯) set_rgb_show(0, 0, 255) # Blue(蓝色) elif hex_data == "AA 55 00 09 FB": # Stop(停止) set_rgb_show(0, 0, 0) print("停止识别") global run_st run_st = False |
12.2.7 Function Expansion
Change the Triggered Color
Note
The program uses red, green, and blue as the default color commands. If you’d like to change these, you can follow the steps below. This section uses replacing the red command with yellow as an example for demonstration.
(1) On the Raspberry Pi desktop, double-click the Terminator icon to open the command-line terminal and enter the ROS1 development environment.
(2) Enter the following command and press Enter to navigate to the directory where the program is located:
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(3) Run the following command to open the program file:
vim ASR_detect_demo.py
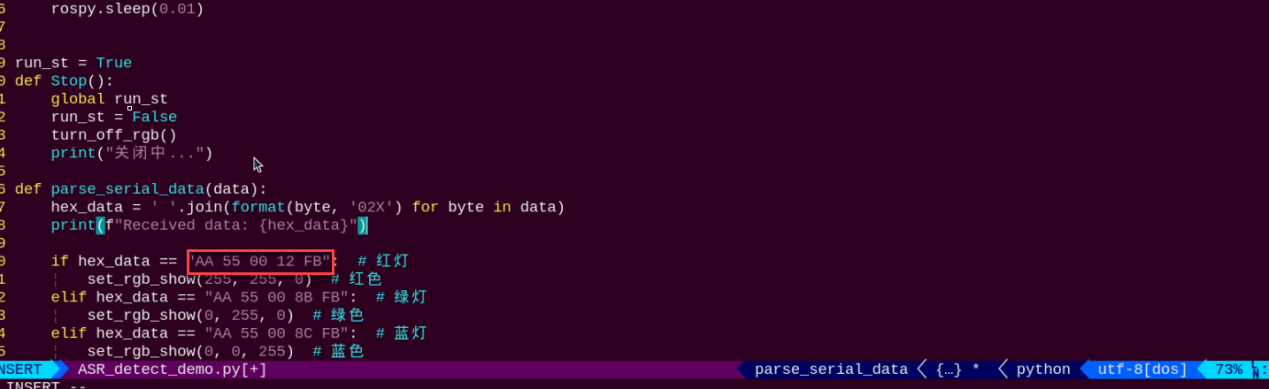
(4) Locate the code section in the area highlighted in the image.
(5) Press “i” on the keyboard to enter edit mode, then update the values in the set_rgb_show function to “255, 255, 0” to represent the color yellow, as shown in the example below.
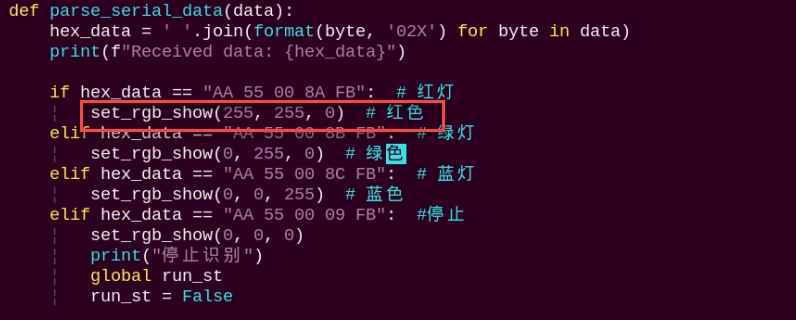
(6) Once the modification is complete, press the Esc key. Then, type the following command (note that a colon : precedes the “wq”) and press Enter to save the changes:
:wq
(7) Afterward, repeat the steps outlined in this document to run the program.
Change Recognition Command Word
(1) On the Raspberry Pi desktop, double-click the Terminator icon to open the command-line terminal and enter the ROS1 development environment.
(2) Enter the following command and press Enter to navigate to the directory where the program is located:
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(3) Run the following command to open the program file:
vim ASR_detect_demo.py
(4) Locate the code section in the area highlighted in the image.
(5) Open the Command Word Protocol Playlist. For example, here we’ll show how to change the command from Red Light to Turn on the light.

(6) Press “i” to enter edit mode, then update the protocol code to match the Turn on the light command, as illustrated below.
(7) Once the modification is complete, press the Esc key. Then, type the following command (note that a colon : precedes the wq) and press Enter to save the changes:
:wq
(8) Afterward, repeat the steps outlined in this document to run the program.
(9) For creating additional command words, please consult the 12.1.7 Firmware Development documentation for detailed instructions.
12.3 Sing and Dance
12.3.1 Preparation
Refer to 12.1 Introduction to WonderEcho Pro and Installation to flash the firmware onto the WonderEcho Pro module. Once the firmware has been successfully burned, install the module onto the robot.
By default, the wake-up word for the WonderEcho Pro factory firmware is Hello, HiWonder. If you wish to change the wake-up word to PuppyPi, please refer to the tutorial titled 12.1.6Firmware Flashing Method for step-by-step instructions.
12.3.2 Brief Game Instructions
The program plays .mp3 audio files using the WonderEcho Pro module’s sound card. Begin by creating a folder called MP3 within the program’s directory.
This program loads MP3 files from a specified directory, allowing users to select and play tracks. It simultaneously controls the robotic dog’s posture, gait, and movements to perform a variety of complex actions, including marching in place, multi-axis coordination, and sliding steps.
The source code is located inside the Docker container at: /home/ubuntu/puppypi/src/puppy_extend_demo/scripts/mp3_moonwalk_demo.py
12.3.3 Starting and Stopping the Game
Note
When entering commands, ensure that case sensitivity is strictly followed. You can use the Tab key to auto-complete keywords.
(1) Power on the robot and remotely connect to the Raspberry Pi desktop via VNC.
(2) On the Raspberry Pi desktop, double-click the Terminator icon  to open the command-line terminal and enter the ROS1 development environment.
to open the command-line terminal and enter the ROS1 development environment.
(3) Enter the following command and press Enter to navigate to the directory where the program is located:
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(4) Open a terminal, enter the following command and press Enter to initiate the program:
python3 mp3_moonwalk_demo.py
(5) Please enter the number of the track you want to play, for example, 11.
(6) To exit this feature, simply press Ctrl+C in the terminal. If the command does not stop the program, please try again.
12.3.4 How It Works
After running the program, the WonderEcho Pro module will play the specified music and perform a dance routine.
12.3.5 Program Download
12.3.6 Brief Program Analysis
Library Files Import
3 4 5 6 7 8 9 10 | import os import math import rospy import signal import subprocess from std_msgs.msg import * from puppy_control.srv import SetRunActionName from puppy_control.msg import Velocity, Pose, Gait |
Robot Movement and Posture Settings
25 26 27 28 29 | PuppyPose = {'roll': math.radians(0), 'pitch': math.radians(0), 'yaw': 0.000, 'height': -10, 'x_shift': -0.5, 'stance_x': 0, 'stance_y': 0} GaitConfig = {'overlap_time': 0.3, 'swing_time': 0.2, 'clearance_time': 0.0, 'z_clearance': 5} MP3_DIR = "//home/ubuntu/puppypi/src/puppy_extend_demo/scripts/MP3" mpg123_process = None |
Acquire MP3 File
32 33 34 35 | def get_mp3_files(directory): """Read all MP3 files from the directory.(从目录中读取所有 MP3 文件)""" files = [f for f in os.listdir(directory) if f.endswith(".mp3")] return {i + 1: os.path.join(directory, f) for i, f in enumerate(files)} |
Retrieve all MP3 files from the specified directory and save their file paths in a dictionary.
Play the Audio
38 39 40 41 42 43 44 45 46 47 48 | def play_audio(file_path): global mpg123_process try: if not os.path.exists(file_path): print(f"文件不存在: {file_path}") return mpg123_process = subprocess.Popen(["mpg123", file_path], stdout=subprocess.DEVNULL, stderr=subprocess.DEVNULL) print(f"正在播放音乐: {file_path}") except FileNotFoundError: print("未找到 `mpg123` 命令,检查系统安装了 `mpg123`。") |
The program uses subprocess.Popen to run the mpg123 command and play a specified MP3 file. If the file is missing or mpg123 isn’t installed, it will display an error message.
Example Action
75 76 77 78 79 80 81 | def linkage(times=1): """Example: multi-axis coordination.(示例:多轴联动)""" for i in range(0, 15, 1): PuppyPose.update({'roll': math.radians(i), 'pitch': math.radians(0)}) PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'], height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time=30) rospy.sleep(0.03) |
As an example, the robotic dog’s posture (roll and pitch) is adjusted to perform coordinated multi-axis movements.
Robot Motion Control
117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 | while True: # Robot dog stands.(机器狗站立) PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'], height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time=500) rospy.sleep(0.5) PuppyGaitConfigPub.publish(overlap_time=GaitConfig['overlap_time'], swing_time=GaitConfig['swing_time'], clearance_time=GaitConfig['clearance_time'], z_clearance=GaitConfig['z_clearance']) # Marching in place.(原地踏步) PuppyVelocityPub.publish(x=0.01, y=0, yaw_rate=0) rospy.sleep(3) PuppyVelocityPub.publish(x=0, y=0, yaw_rate=0) rospy.sleep(1) # Multi-axis coordination.(多轴联动) linkage(2) # Move forward.(向前走) PuppyVelocityPub.publish(x=5, y=0, yaw_rate=0) rospy.sleep(3) PuppyVelocityPub.publish(x=0, y=0, yaw_rate=0) # Move backward.(向后走) rospy.sleep(1) PuppyVelocityPub.publish(x=-5, y=0, yaw_rate=0) rospy.sleep(3) PuppyVelocityPub.publish(x=0, y=0, yaw_rate=0) # Sliding motion group.(滑步动作组) runActionGroup_srv('moonwalk.d6ac', True) rospy.sleep(0.5) |
It can control the robotic dog to carry out basic actions like standing, marching in place, multi-axis coordination, moving forward, and moving backward, as well as execute predefined action sequences such as the moonwalk.
12.3.7 Function Expansion
Modifying Dance Movements
(1) Double-click the Terminator icon on the Raspberry Pi desktop to launch the terminal and access the ROS1 development environment.
(2) Enter the following command and press Enter to navigate to the directory where the program is located:
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(3) Run the following command to open the program file:
vim mp3_moonwalk_demo.py
(4) Locate the code section in the area highlighted in the image.
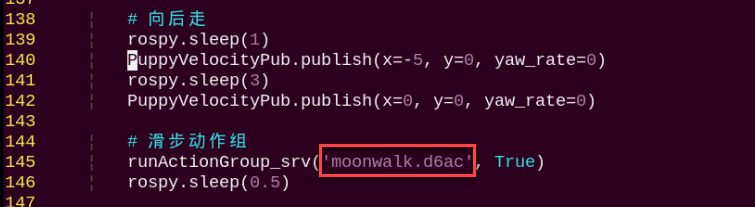
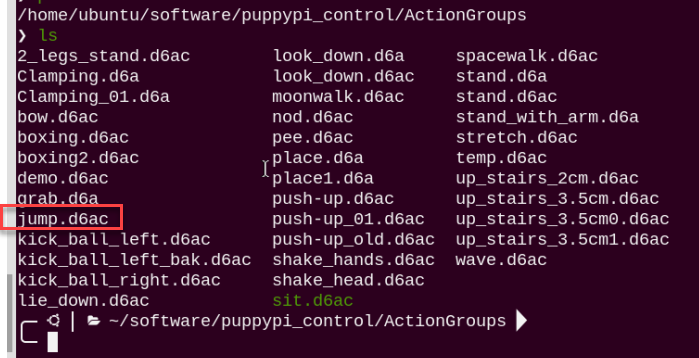
(5) Press the i key to enter edit mode. Modify the action group name at this location to match the action group from the ActionGroups file. For example, change it to jump.d6ac, as shown in the image.
(6) Once the modification is complete, press the Esc key. Then, type the following command (note that a colon : precedes the wq) and press Enter to save the changes:
:wq
(7) Afterward, repeat the steps outlined in this document to run the program.
(8) If you wish to implement additional actions, refer to the 5. ROS1-PC Software Action Editing Course -> 5.3 Action Editing document for guidance on creating action groups.
12.4 Voice Interaction
12.4.1 Preparation
Refer to 12.1 Introduction to WonderEcho Pro and Installation to flash the firmware onto the WonderEcho Pro module. Once the firmware has been successfully burned, install the module onto the robot.
By default, the wake-up word for the WonderEcho Pro factory firmware is Hello, HiWonder. If you wish to change the wake-up word to PuppyPi, please refer to the tutorial titled 12.1.6 Firmware Flashing Method for step-by-step instructions.
12.4.2 Brief Game Instructions
This program receives commands through the serial port, processes them, and controls the robotic dog to perform the corresponding actions. Leveraging the ROS framework, it manages the robot’s posture, gait, and speed, while enabling voice interaction by accepting external commands via serial communication.
12.4.3 Starting and Stopping the Game
Note
When entering commands, ensure that case sensitivity is strictly followed. You can use the Tab key to auto-complete keywords.
(1) Power on the robot and remotely connect to the Raspberry Pi desktop via VNC.
(2) On the Raspberry Pi desktop, double-click the Terminator icon  to open the command-line terminal and enter the ROS1 development environment.
to open the command-line terminal and enter the ROS1 development environment.
(3) Execute the following command to disable the app service:
~/.stop_ros.sh
(4) Type the command and press Enter to start the motion control node.
roslaunch puppy_control puppy_control.launch
(5) Open a new terminal window, enter the following command, and press Enter to switch to the directory where the program is located.
cd /home/ubuntu/puppypi/src/puppy_extend_demo/scripts
(6) Enter the following command and press Enter to initiate the program:
python3 voice_interaction_demo.py
(7) To exit this feature, simply press Ctrl+C in the terminal. If the command does not stop the program, please try again.
(8) Click the icon in the top-left corner of the Raspberry Pi desktop  to open the terminal. Next, enter the command and press Enter to enable the mobile app’s auto-start service.
to open the terminal. Next, enter the command and press Enter to enable the mobile app’s auto-start service.
sudo systemctl restart start_node.service
12.4.4 How It Works
Note
The wake-up commands vary depending on the firmware installed. If you are using the Chinese Xiaohuan Xiaohuan firmware, please use the Chinese commands below. For PuppyPi or Hello HiWonder firmware, use the English commands provided.
| User Command | Terminal print | Actions |
|---|---|---|
| puppypi | AA 55 03 00 FB | |
| STAND-STILL | AA 55 00 76 FB | March on the spot |
| LOOK-UP | AA 55 00 8D FB | Look up |
| GET-DOWN | AA 55 00 0B FB | Lie down |
| TATTENTION | AA 55 00 0A FB | Stand at attention |
Note
Once the program is running, the robotic dog will stay in a standing position. To activate voice control, simply say PuppyPi After activation, you can issue various voice commands—for example, say LOOK-UP and the dog will lift its head, GET-DOWN to switch to a resting posture, ATTENTION to return to standing, or STAND-STILL to start stepping on the spot. If no commands are received for over 15 seconds, the system will automatically enter sleep mode. Just say PuppyPi again to wake it up.
12.4.5 Program Download
12.4.6 Brief Program Analysis
The source code for this program is located inside the Docker container at: /home/ubuntu/puppypi/src/puppy_extend_demo/scripts/voice_interaction_demo.py
Library Files Import
1 2 3 4 5 6 7 | import os import sys import rospy import math import serial from std_msgs.msg import * from puppy_control.msg import Velocity, Pose, Gait |
Robot Movement and Posture Settings
22 23 24 | # Initialize robot dog's posture and gait configuration.(初始化机器狗的姿态和步态配置) PuppyPose = {'roll': math.radians(0), 'pitch': math.radians(0), 'yaw': 0.000, 'height': -10, 'x_shift': -0.5, 'stance_x': 0, 'stance_y': 0} GaitConfig = {'overlap_time': 0.2, 'swing_time': 0.2, 'clearance_time': 0.0, 'z_clearance': 3} |
Processing Incoming Data
33 34 35 36 37 | # Parse serial data.(解析串口数据) def parse_serial_data(data): # Convert byte data to hexadecimal string.(将字节数据转换为十六进制字符串) hex_data = ' '.join(format(byte, '02X') for byte in data) print(f"Received data: {hex_data}") |
Convert the incoming byte data into a hexadecimal string and display it.
Performing Actions
39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 | # Execute corresponding actions based on different commands.(根据不同的指令执行相应的动作) if hex_data == "AA 55 00 76 FB": # March in place.(原地踏步) print("执行原地踏步") PuppyPose = {'roll':math.radians(0), 'pitch':math.radians(0), 'yaw':0.000, 'height':-10, 'x_shift':-0.5, 'stance_x':0, 'stance_y':0} PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'],height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time = 500) rospy.sleep(0.5) PuppyVelocityPub.publish(x=0.1, y=0, yaw_rate=0) rospy.sleep(2) PuppyVelocityPub.publish(x=0, y=0, yaw_rate=0) elif hex_data == "AA 55 00 0A FB": # Stand at attention.(立正) print("执行立正") PuppyPose = {'roll':math.radians(0), 'pitch':math.radians(0), 'yaw':0.000, 'height':-10, 'x_shift':-0.5, 'stance_x':0, 'stance_y':0} PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'],height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time = 500) elif hex_data == "AA 55 00 0B FB": # Lie down.(趴下) print("执行趴下") PuppyPose = {'roll':math.radians(0), 'pitch':math.radians(0), 'yaw':0.000, 'height':-6, 'x_shift':-0.5, 'stance_x':0, 'stance_y':0} PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'],height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time = 500) elif hex_data == "AA 55 00 8D FB": # (抬头) print("执行抬头") PuppyPose = {'roll':math.radians(0), 'pitch':math.radians(20), 'yaw':0.000, 'height':-10, 'x_shift':-0.5, 'stance_x':0, 'stance_y':0} PuppyPosePub.publish(stance_x=PuppyPose['stance_x'], stance_y=PuppyPose['stance_y'], x_shift=PuppyPose['x_shift'],height=PuppyPose['height'], roll=PuppyPose['roll'], pitch=PuppyPose['pitch'], yaw=PuppyPose['yaw'], run_time = 500) elif hex_data == "AA 55 00 09 FB": # Stop.(停止) print("停止识别") PuppyVelocityPub.publish(x=0, y=0, yaw_rate=0) global run_st run_st = False |
Based on the received commands, the robot carries out the appropriate movements or posture changes.