3. Multimedia Course
3.1 Sensor Experiment
3.1.1 Experiment Overview
This section uses a program to demonstrate how to leverage the K230’s three-channel output capability to send the same camera feed to three display areas simultaneously in different resolutions/formats for real-time comparison.
The K230 features three MIPI-CSI inputs (3×2 lanes or 1×4 + 1×2 lanes) and can connect up to three cameras. Each camera supports three output channels, allowing different resolutions and image formats.
3.1.2 Preparation
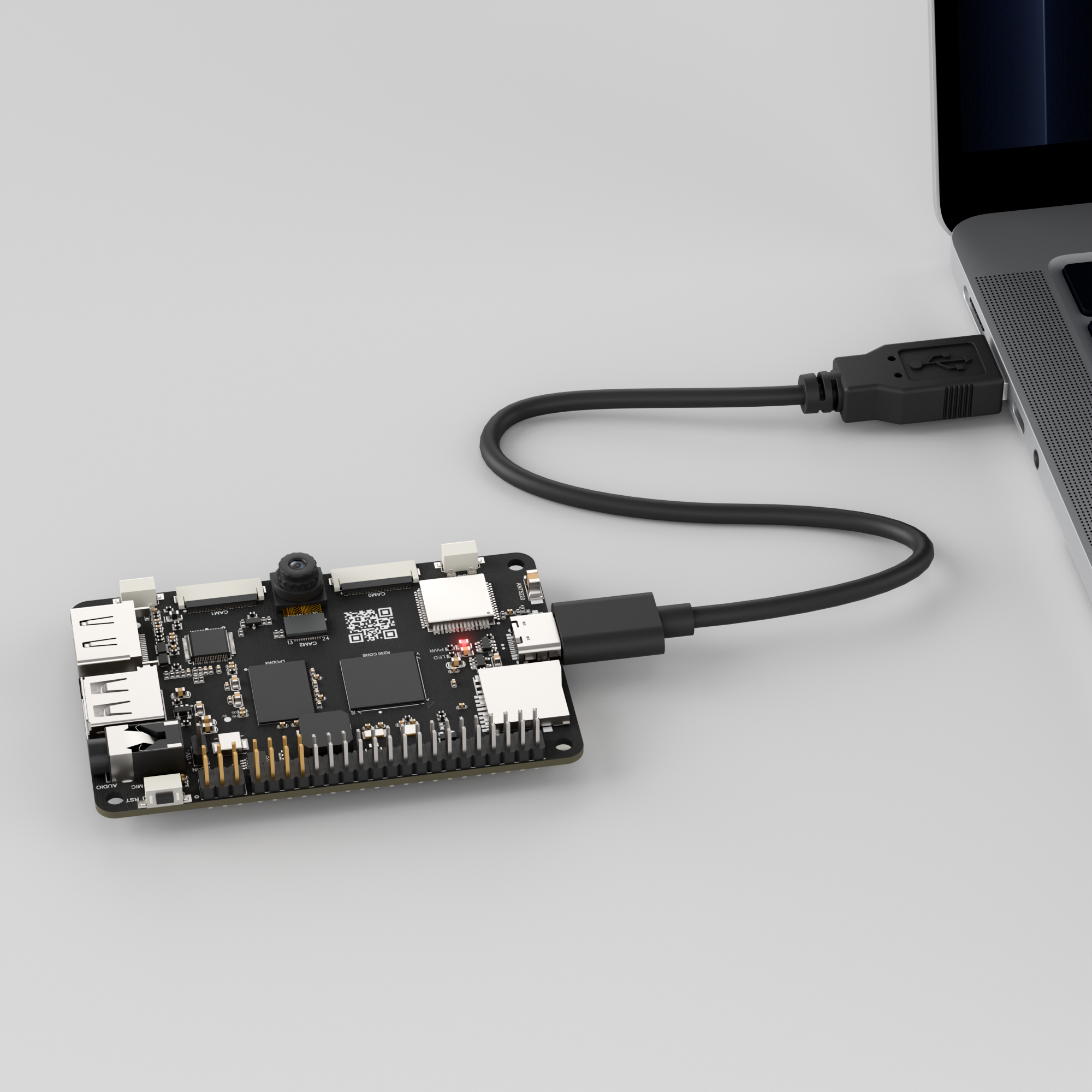
Module Connection
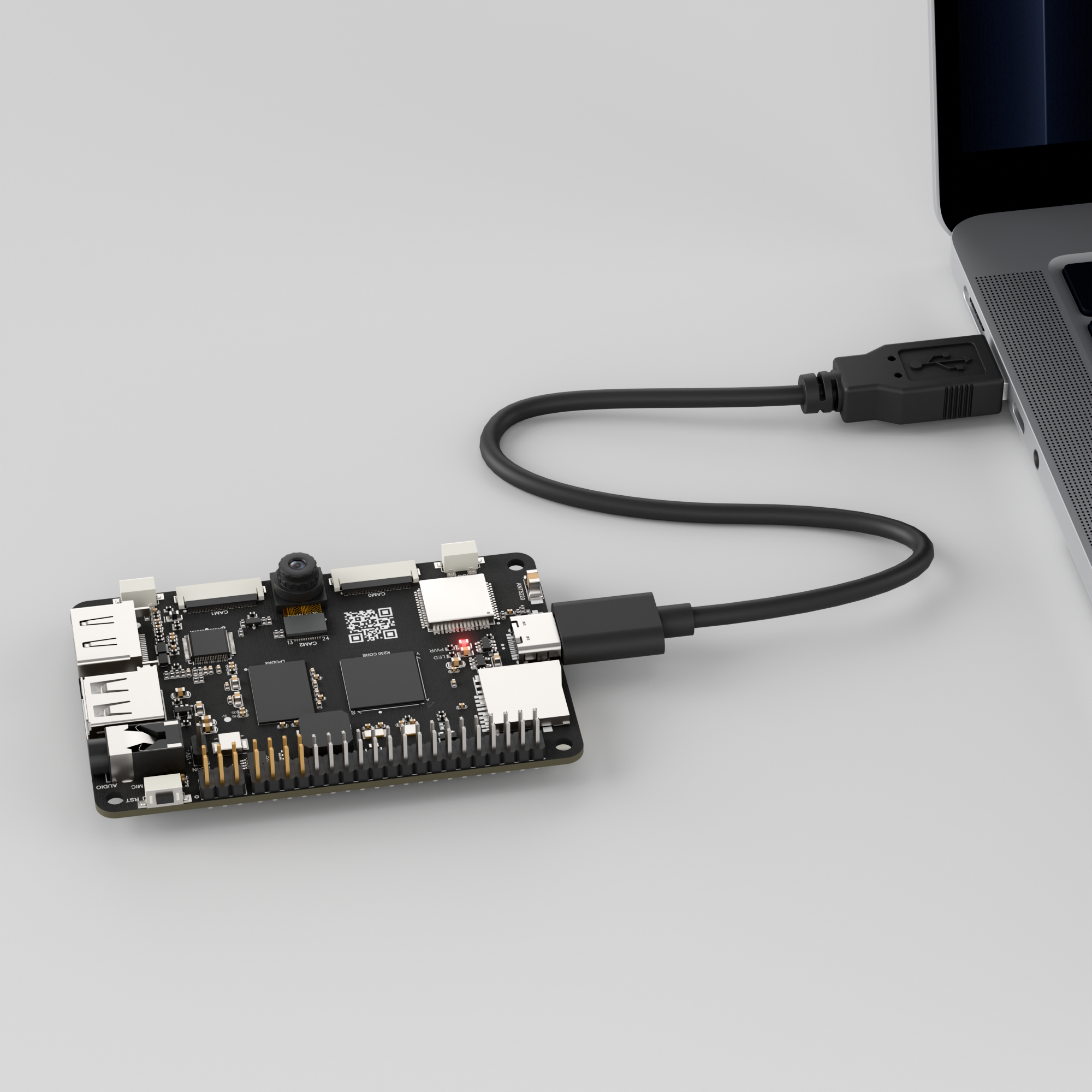
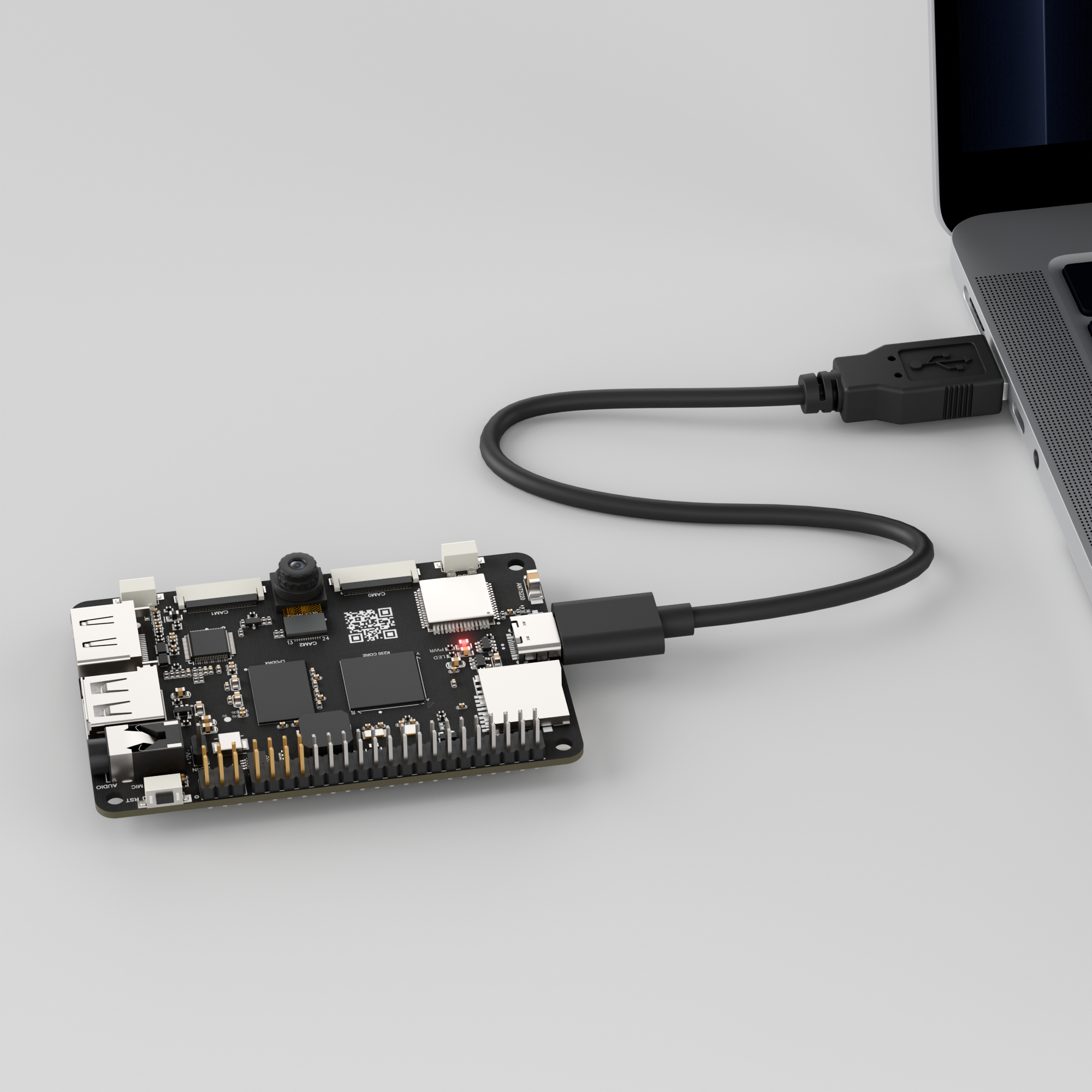
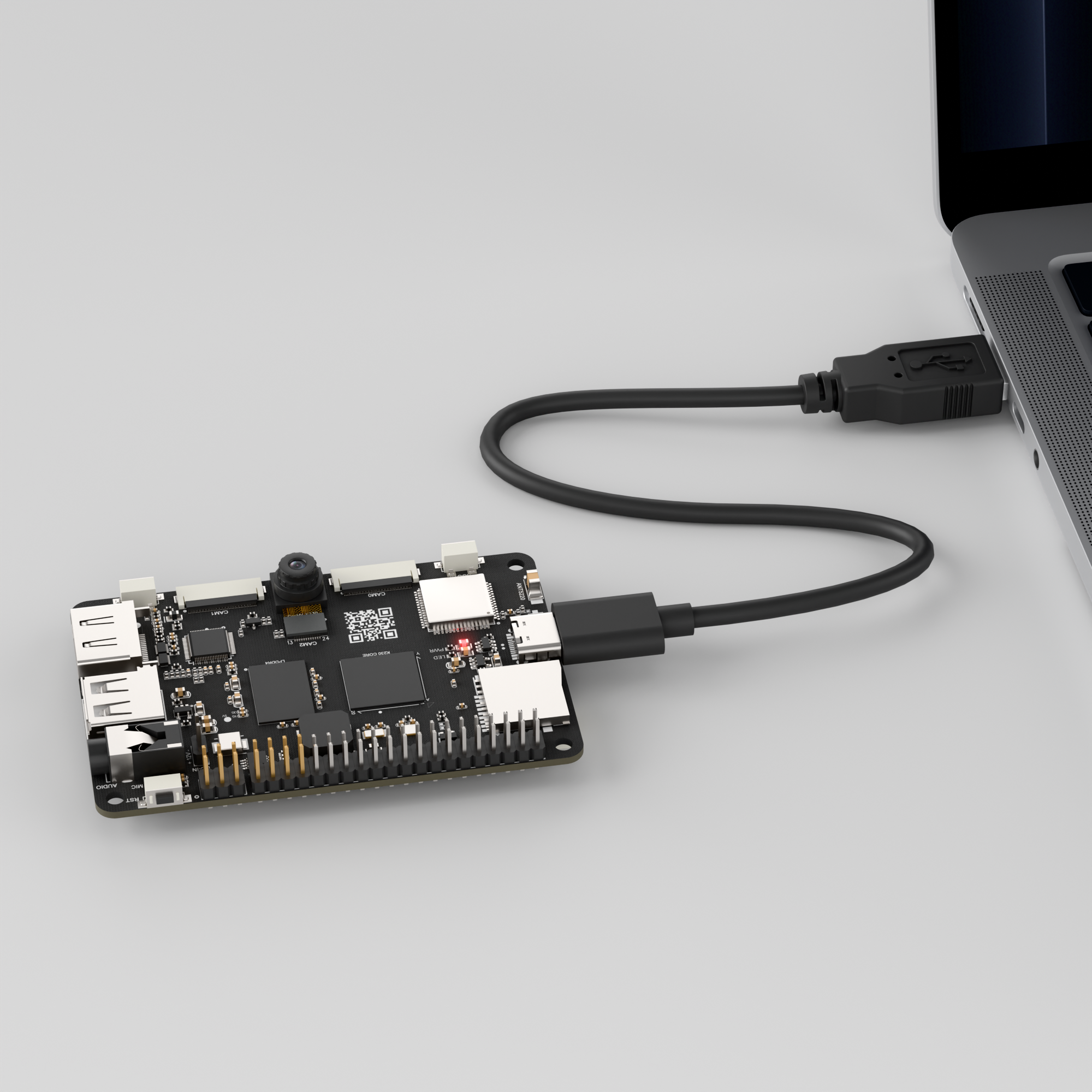
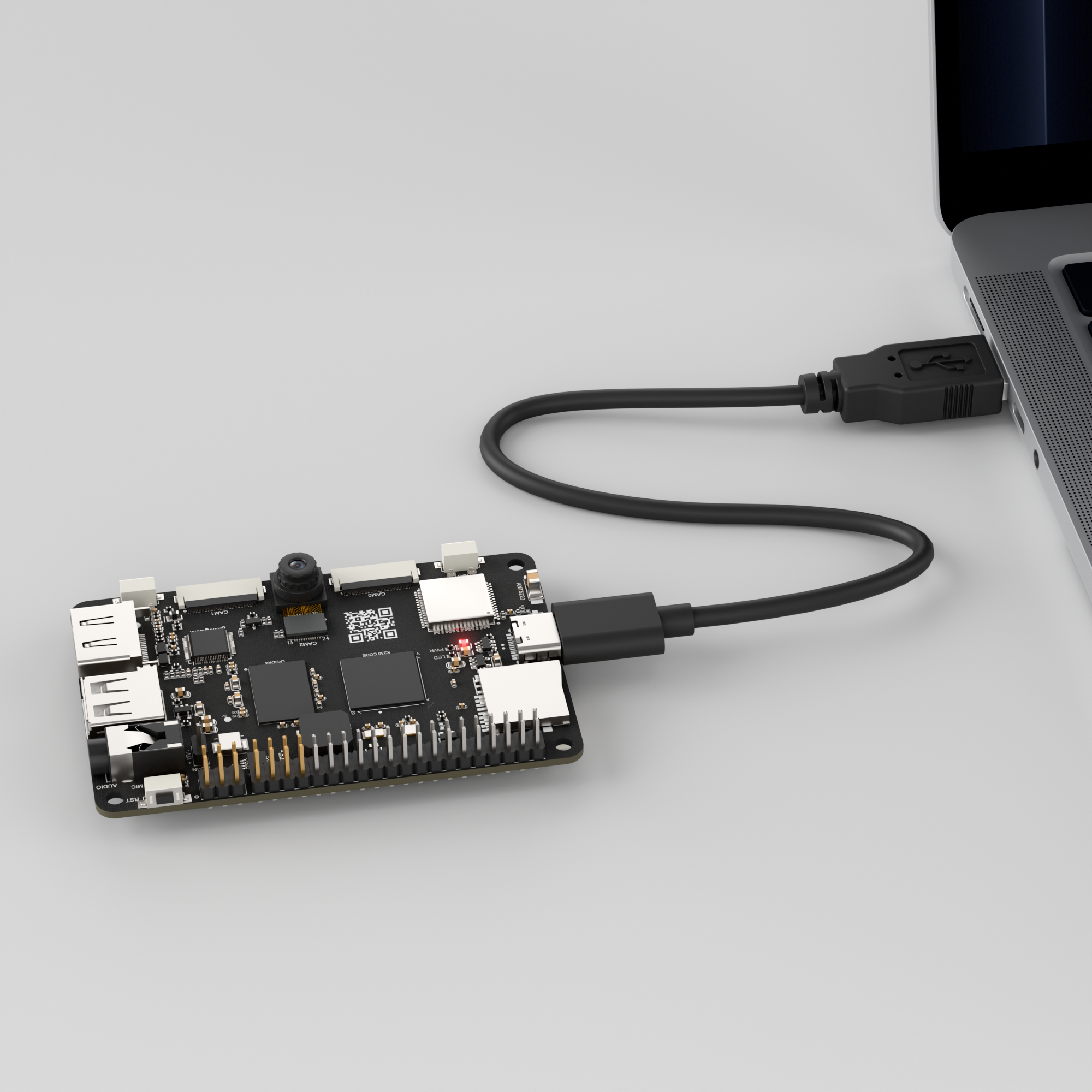
Connect the K230 board to your PC using a Type-C data cable, as shown below:
Double-click to open CanMV IDE K230.

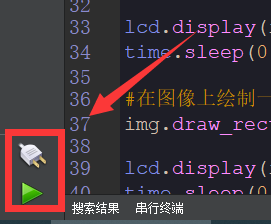
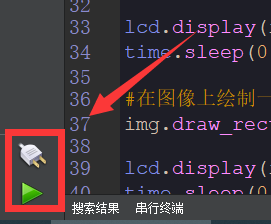
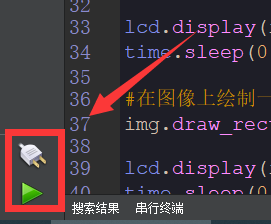
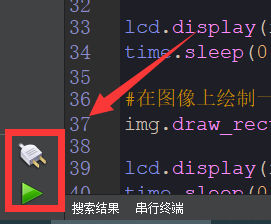
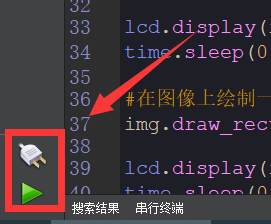
Click the connection button in the lower left corner.

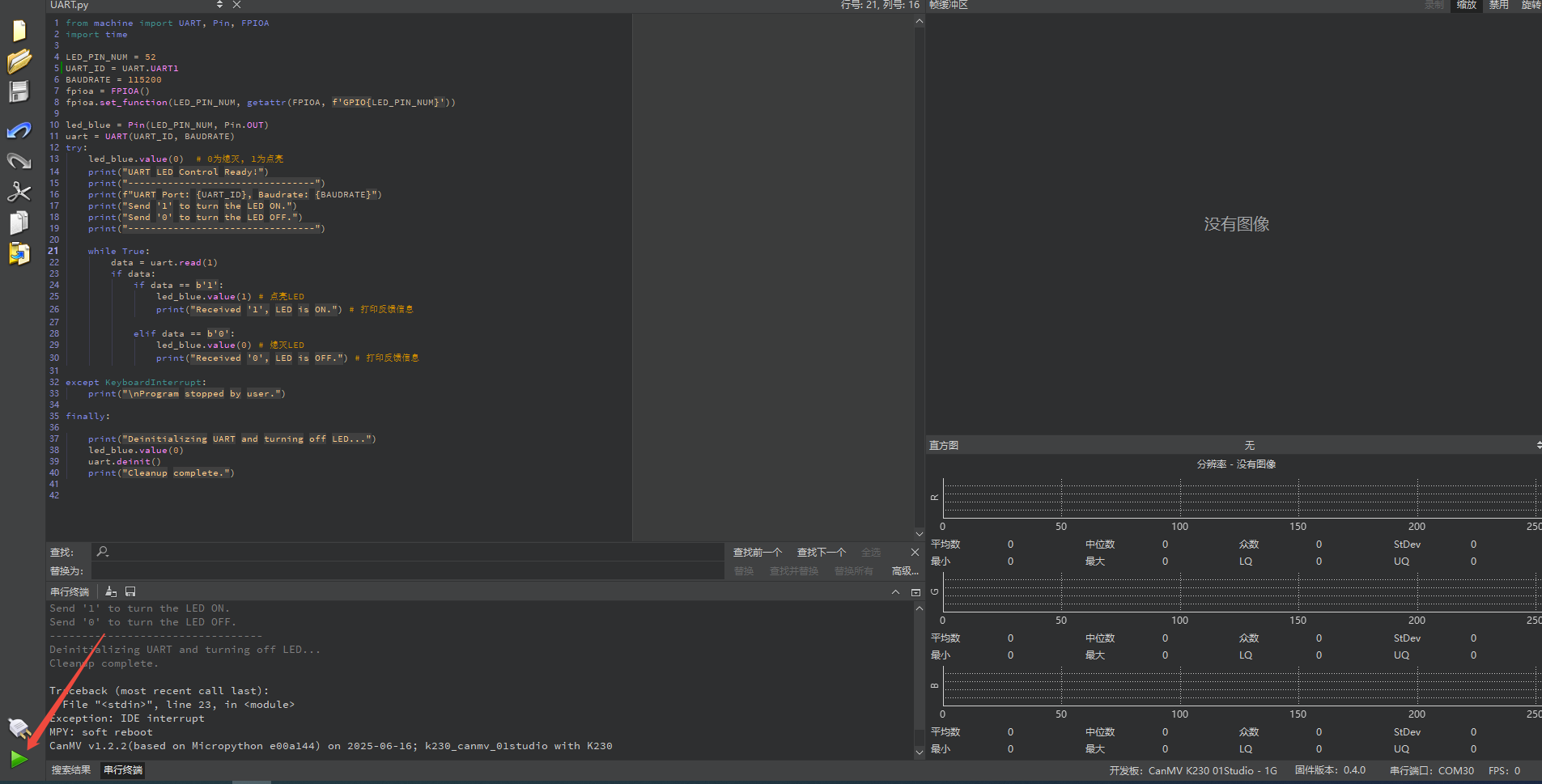
When connection is successful, the lower left corner of CanMV IDE will display the icon shown below.
If connection takes more than 10 seconds, it has failed. Click the Cancel button, and a dialog box will appear. Click OK and recheck the connection.
Note
Connection Failure Causes and Solutions:
Cable is not a data cable: Some Type-C cables are charging-only cables without data transfer capability. Please use a Type-C cable with data transfer functionality. The factory-supplied cable is a Type-C data cable.
Other K230 firmware was flashed: Re-flash the factory firmware, then reconnect.
3.1.3 Program Execution and Download
Display Mode Configuration:
The program can use the select_display="" parameter to choose the display mode: HDMI, LCD, or IDE virtual.

The K230 program supports two operation modes: online execution and offline execution.
Online Execution:
After connecting, drag the program Sensor.py into the CanMV IDE K230 code editor, then click the run button  in the lower left corner to execute the program online, as shown below:
in the lower left corner to execute the program online, as shown below:
Note
Programs run using this method will be lost after disconnecting or powering off, and will not be saved on the development board.
Offline Execution:
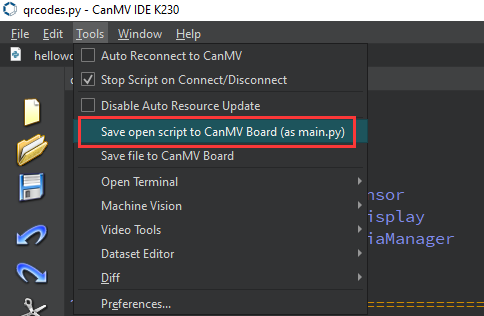
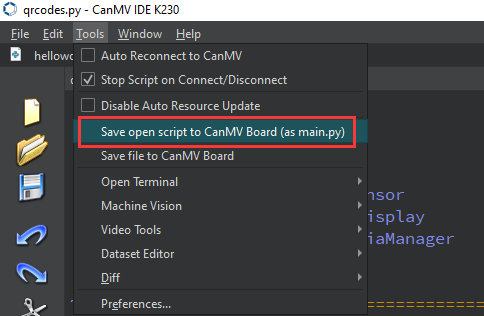
After connecting, drag the program Sensor.py into the CanMV IDE K230 code editor, click Tools in the toolbar, and select Save open script to CanMV Board (as main.py), as shown below:
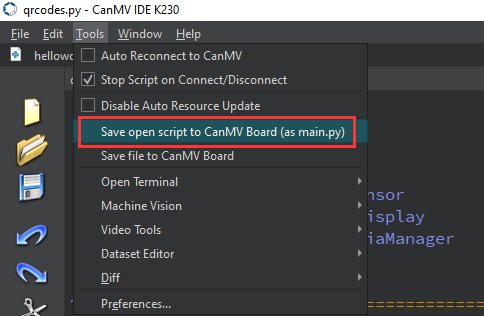
Then click Yes.
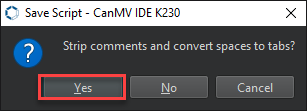
Once the file is written, click OK to confirm and complete saving the MicroPython file to the K230 development board.
With this method, the K230 development board will automatically run the MicroPython file upon power-up without connection, enabling offline execution.
3.1.4 Program Outcome
The same camera feed is simultaneously sent to three display areas on the HDMI screen in three different resolutions/formats for real-time comparison.

3.1.5 Program Analysis
Import Required Libraries
# Camera Example
import time
import os
import sys
from media.sensor import *
from media.display import *
from media.media import *
sensor = None
Main Loop
while True:
os.exitpoint()
img = sensor.snapshot(chn=CAM_CHN_ID_1)
Display.show_image(img, alpha=128)
img = sensor.snapshot(chn=CAM_CHN_ID_2)
Display.show_image(img, x=1920 - 640, layer=Display.LAYER_OSD1)
except KeyboardInterrupt as e:
print("User stopped: ", e) # Stopped by user
except BaseException as e:
print(f"Exception: {e}") # Exception
finally:
# Stop sensor
if isinstance(sensor, Sensor):
sensor.stop()
# Deinitialize display
Display.deinit()
os.exitpoint(os.EXITPOINT_ENABLE_SLEEP)
time.sleep_ms(100)
# Release media buffer
MediaManager.deinit()
img = sensor.snapshot(chn=CAM_CHN_ID_1): Captures the current frame from camera channel 1.Display.show_image(img, alpha=128): Displays the image on the default display layer with transparency set to 128, resulting in semi-transparent.img = sensor.snapshot(chn=CAM_CHN_ID_2): Captures the current frame from camera channel 2.Display.show_image(img, x=1920 - 640, layer=Display.LAYER_OSD1): Displays the image in the lower right corner of the screen at position 1920-640 = 1280 on the OSD1 layer.
3.2 Display Experiment
3.2.1 Experiment Overview
This section demonstrates how to use the K230 to call the CanMV Display module to implement image display functionality.
3.2.2 Preparation
Module Connection
Connect the K230 development board to your PC using a Type-C data cable, as shown below:
Double-click to open CanMV IDE K230.

Click the connection button in the lower left corner.

When connection is successful, the lower left corner of CanMV IDE will display the icon shown below.
If connection takes more than 10 seconds, it has failed. Click the Cancel button, and a dialog box will appear. Click OK and recheck the connection.
Note
Connection Failure Causes and Solutions:
Cable is not a data cable: Some Type-C cables are charging-only cables without data transfer capability. Please use a Type-C cable with data transfer functionality. The factory-supplied cable is a Type-C data cable.
Other K230 firmware was flashed: Re-flash the factory firmware, then reconnect.
3.2.3 Program Execution and Download
Display Mode Configuration:
The program can use the select_display="" parameter to choose the display mode: HDMI, LCD, or IDE virtual.

The K230 program supports two operation modes: online execution and offline execution.
Online Execution:
After connecting, drag the program Display.py into the CanMV IDE K230 code editor, then click the run button  in the lower left corner to execute the program online, as shown below:
in the lower left corner to execute the program online, as shown below:
Note
Programs run using this method will be lost after disconnecting or powering off, and will not be saved on the development board.

Offline Execution:
After connecting, drag the program Display.py from the same directory into the CanMV IDE K230 code editor, click Tools in the toolbar, and select Save open script to CanMV Board (as main.py), as shown below:
Then click Yes.
Once the file is written, click OK to confirm and complete saving the MicroPython file to the K230 development board.
With this method, the K230 development board will automatically run the MicroPython file upon power-up without connection, enabling offline execution.
3.2.4 Program Outcome
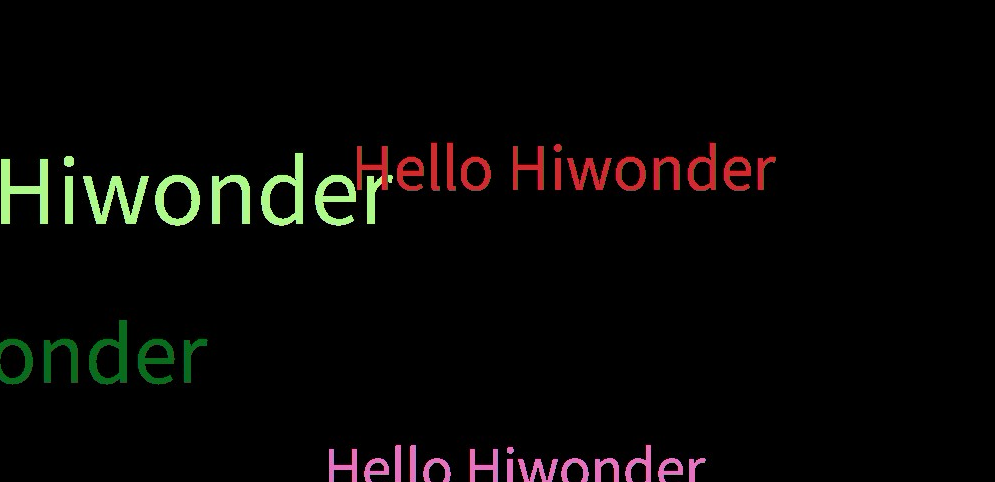
On the screen, ten “Hello Hiwonder” strings appear every second, with their size, color, and position completely random. This creates a colorful, continuously flickering, dynamic text kaleidoscope effect.
3.2.5 Program Analysis
Import Required Libraries
import time, os, urandom, sys
from media.display import *
from media.media import *
import image
Main Loop
try:
# --- Step 3: Main loop for drawing and display ---
while True:
# Clear the canvas for redrawing
img.clear()
# Draw 10 colorful strings at random positions on the canvas
for i in range(10):
x = (urandom.getrandbits(11) % img.width())
y = (urandom.getrandbits(11) % img.height())
r = (urandom.getrandbits(8))
g = (urandom.getrandbits(8))
b = (urandom.getrandbits(8))
size = (urandom.getrandbits(30) % 64) + 32
# Call advanced drawing function to render strings
img.draw_string_advanced(x, y, size, "Hello Hiwonder", color=(r, g, b))
# Display the rendered image on the screen
Display.show_image(img)
time.sleep(1)
os.exitpoint()
img.clear(): Completely clears the memory canvas before each frame is drawn.urandom.getrandbits(): Generates high-quality random numbers to determine string position (x, y), color (r, g, b), and size, creating unpredictable dynamics.img.draw_string_advanced(): Performs the actual drawing operation on the memory canvasimg.Display.show_image(img): It pushes or refreshes the fully drawn image in the memory canvasimgonto the physical screen in a single operation. This “draw in memory first, then display at once” mechanism is called double buffering and helps prevent screen tearing and flickering.time.sleep(1): Pauses the program for one second. This controls the animation frame rate, which is 1 FPS here, allowing each frame to be clearly observed.
3.3 Audio Experiment
3.3.1 Experiment Overview
This section demonstrates using the K230 to access the microphone module for recording and playback.
3.3.2 Preparation
Hardware Introduction
Note
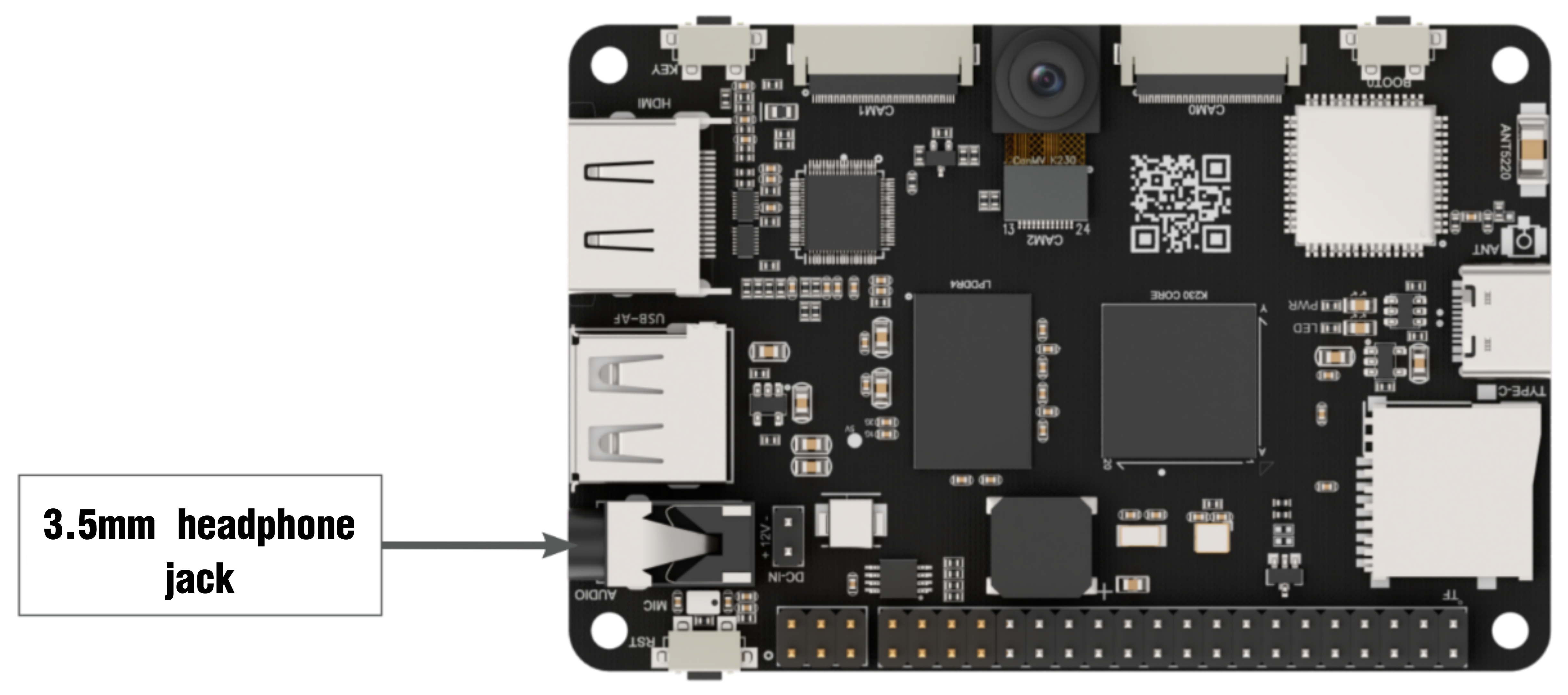
Hiwonder does not provide a built-in audio output device, so please prepare your own. For external speakers, connect them to the 3.5-millimeter headphone jack as shown in the figure below.
Module Connection
Connect the K230 development board to your PC using a Type-C data cable, as shown below:
Double-click to open CanMV IDE K230.

Click the connection button in the lower left corner.

When connection is successful, the lower left corner of CanMV IDE will display the icon shown below.
If connection takes more than 10 seconds, it has failed. Click the Cancel button, and a dialog box will appear. Click OK and recheck the connection.
Note
Connection Failure Causes and Solutions:
Cable is not a data cable: Some Type-C cables are charging-only cables without data transfer capability. Please use a Type-C cable with data transfer functionality. The factory-supplied cable is a Type-C data cable.
Other K230 firmware was flashed: Re-flash the factory firmware, then reconnect.
3.3.3 Program Execution and Download
The K230 program supports two operation modes: online execution and offline execution.
Online Execution:
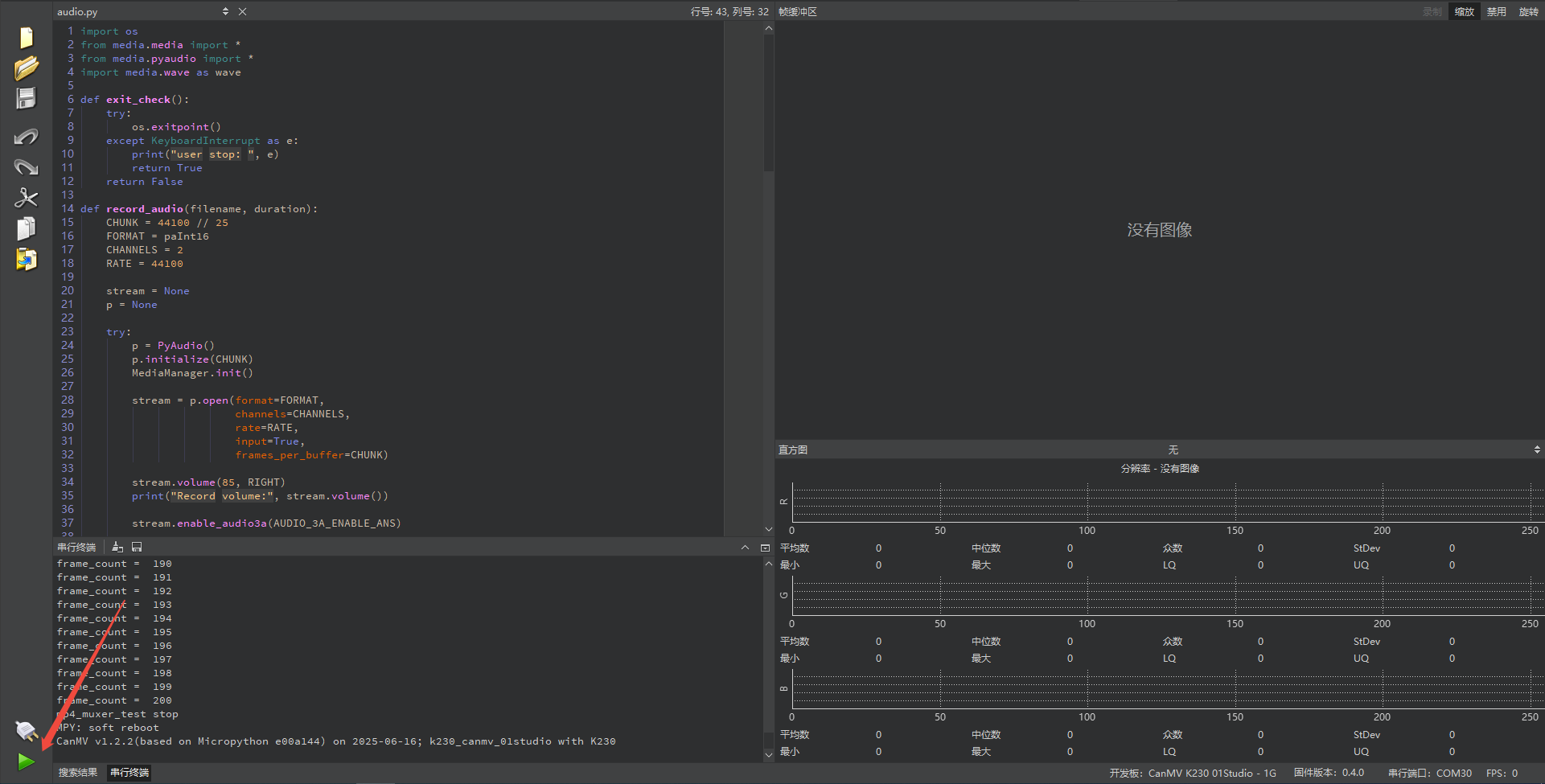
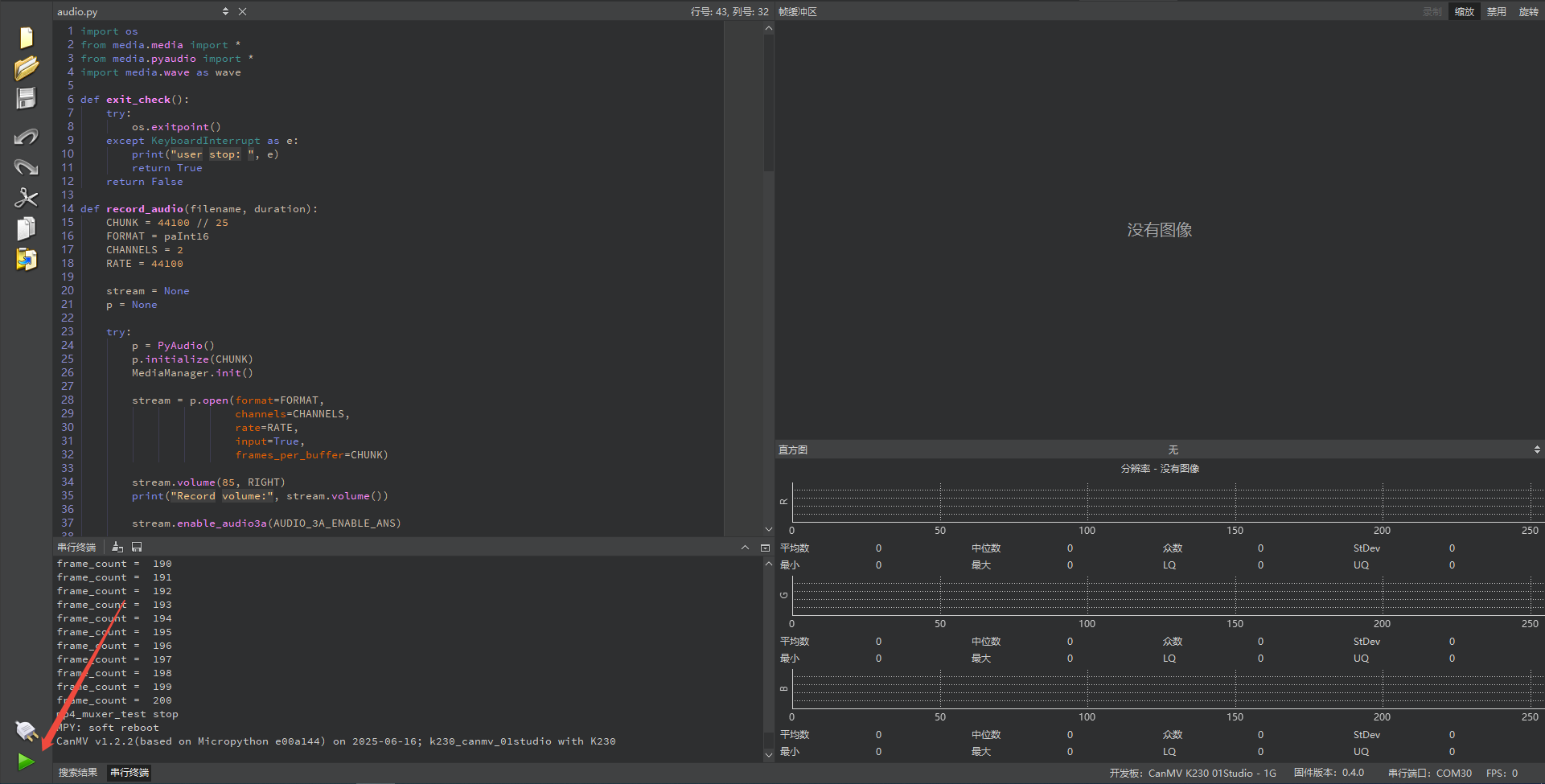
After connecting, drag the program audio.py into the CanMV IDE K230 code editor, then click the run button  in the lower left corner to execute the program online, as shown below:
in the lower left corner to execute the program online, as shown below:
Note
Programs run using this method will be lost after disconnecting or powering off, and will not be saved on the development board.
Offline Execution:
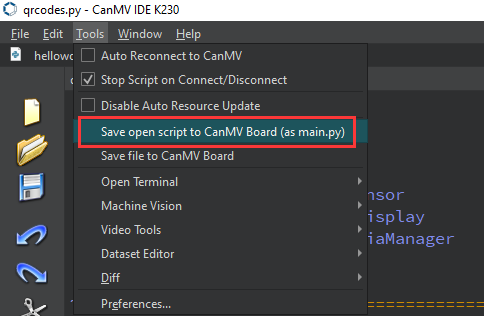
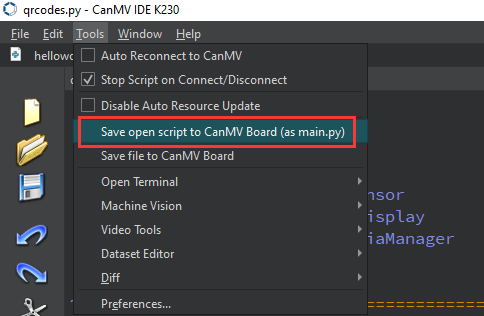
After connecting, drag the program audio.py from the same directory into the CanMV IDE K230 code editor, click Tools in the toolbar, and select Save open script to CanMV Board (as main.py), as shown below:
Then click Yes.
Once the file is written, click OK to confirm and complete saving the MicroPython file to the K230 development board.
With this method, the K230 development board will automatically run the MicroPython file upon power-up without connection, enabling offline execution.
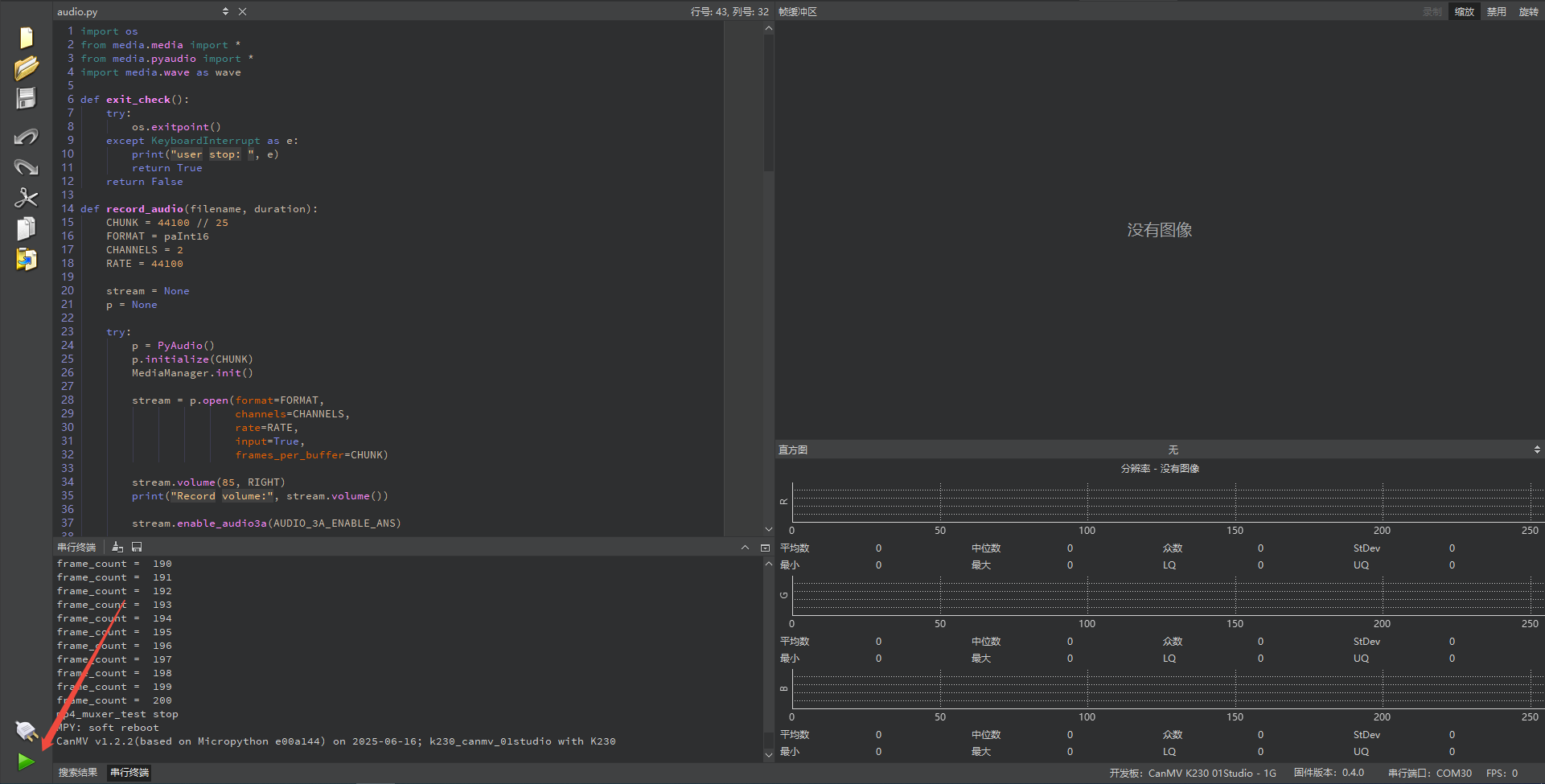
3.3.4 Program Outcome
The program starts, automatically records audio for 5 seconds, saves the recording file, plays back the recorded audio, and ends when playback is complete.
3.3.5 Program Analysis
Import Required Libraries
import os
from media.media import * # Import media module for initializing vb buffer
from media.pyaudio import * # Import pyaudio module for audio recording and playback
import media.wave as wave # Import wav module for saving and loading wav audio files
Recording Main Loop Analysis
def record_audio(filename, duration):
CHUNK = 44100//25 # Set audio chunk value
FORMAT = paInt16 # Set sampling precision, supports 16bit(paInt16)/24bit(paInt24)/32bit(paInt32)
CHANNELS = 2 # Set number of channels, supports mono(1)/stereo(2)
RATE = 44100 # Set sampling rate
try:
p = PyAudio()
p.initialize(CHUNK) # Initialize PyAudio object
MediaManager.init() # Initialize vb buffer
# Create audio input stream
stream = p.open(format=FORMAT,
channels=CHANNELS,
rate=RATE,
input=True,
frames_per_buffer=CHUNK)
stream.volume(vol=70, channel=LEFT)
stream.volume(vol=85, channel=RIGHT)
print("volume :",stream.volume())
# Enable audio 3A feature: Automatic Noise Suppression (ANS)
stream.enable_audio3a(AUDIO_3A_ENABLE_ANS)
frames = []
# Capture audio data and store in list
for i in range(0, int(RATE / CHUNK * duration)):
data = stream.read()
frames.append(data)
if exit_check():
break
# Save list data to wav file
wf = wave.open(filename, 'wb') # Create wav file
wf.set_channels(CHANNELS) # Set wav channel count
wf.set_sampwidth(p.get_sample_size(FORMAT)) # Set wav sampling precision
wf.set_framerate(RATE) # Set wav sampling rate
wf.write_frames(b''.join(frames)) # Save wav audio data
wf.close() # Close wav file
except BaseException as e:
print(f"Exception {e}")
finally:
stream.stop_stream() # Stop audio data capture
stream.close()# Close audio input stream
p.terminate()# Release audio object
MediaManager.deinit() # Release vb buffer
for i in range(0, int(RATE / CHUNK * duration)): This is a precise counting loop for controlling the recording duration. It calculates the total number of iterations in advance based on the audio sample rate (RATE), chunk size (CHUNK), and the desired duration, ensuring that the recording lasts for the specified number of seconds.data = stream.read(): Performs the core recording operation. The audio device reads a block of raw audio data (CHUNK) from the input stream, which is the hardware buffer of the microphone.frames.append(data): Adds the audio data blockdatajust captured from the microphone to a Python list calledframes. This operation temporarily stores all the audio data in memory in sequence, preparing it to be written to a file all at once after recording ends.
Playback Main Loop Analysis
def play_audio(filename):
try:
wf = wave.open(filename, 'rb')# Open wav file
CHUNK = int(wf.get_framerate()/25)# Set audio chunk value
p = PyAudio()
p.initialize(CHUNK) # Initialize PyAudio object
MediaManager.init() # Initialize vb buffer
# Create audio output stream, all audio parameters are obtained from the wave file
stream = p.open(format=p.get_format_from_width(wf.get_sampwidth()),
channels=wf.get_channels(),
rate=wf.get_framerate(),
output=True,frames_per_buffer=CHUNK)
# Set audio output stream volume
stream.volume(vol=85)
data = wf.read_frames(CHUNK)# Read one frame of data from wav file
while data:
stream.write(data) # Write frame data to audio output stream
data = wf.read_frames(CHUNK) # Read one frame of data from wav file
if exit_check():
break
except BaseException as e:
print(f"Exception {e}")
finally:
stream.stop_stream() # Stop audio output stream
stream.close()# Close audio output stream
p.terminate()# Release audio object
wf.close()# Close wav file
MediaManager.deinit() # Release vb buffer
wf = wave.open(filename, 'rb'): Opens the previously saved .wav audio file.p = PyAudio() and MediaManager.init(): As with recording, the audio core interface and underlying media hardware are re-initialized to prepare for playback.stream = p.open(...): An audio output stream is opened, reading dynamically from the .wav file.data = wf.read_frames(CHUNK): Preloads the first data block. Before entering the loop, read a small chunk of audio data from the file into thedatavariable to prepare for the playback loop.while data: Loop ->stream.write(data): This command sends the audio data block stored in thedatavariable to the hardware playback buffer, producing sound from the speakers.
3.4 Video Experiment
3.4.1 Experiment Overview
This section demonstrates how to use the K230 to encode video streams in H264 or H265 formats for recording and playback.
3.4.2 Preparation
Hardware Introduction
Note
Hiwonder does not provide a built-in audio output device, so please prepare your own. For external speakers, connect them to the 3.5-millimeter headphone jack as shown in the figure below.
Module Connection
Connect the K230 development board to your PC using a Type-C data cable, as shown below:
Double-click to open CanMV IDE K230.

Click the connection button in the lower left corner.

When connection is successful, the lower left corner of CanMV IDE will display the icon shown below.
If connection takes more than 10 seconds, it has failed. Click the Cancel button, and a dialog box will appear. Click OK and recheck the connection.
Note
Connection Failure Causes and Solutions:
Cable is not a data cable: Some Type-C cables are charging-only cables without data transfer capability. Please use a Type-C cable with data transfer functionality. The factory-supplied cable is a Type-C data cable.
Other K230 firmware was flashed: Re-flash the factory firmware, then reconnect.
3.4.3 Program Execution and Download
The K230 program supports two operation modes: online execution and offline execution.
Online Execution:
After connecting, drag the program Video_Recording.py into the CanMV IDE K230 code editor, then click the run button  in the lower left corner to execute the program online, as shown below:
in the lower left corner to execute the program online, as shown below:
Note
Programs run using this method will be lost after disconnecting or powering off, and will not be saved on the development board.
Offline Execution:
After connecting, drag the program audio.py from the same directory into the CanMV IDE K230 code editor, click Tools in the toolbar, and select Save open script to CanMV Board (as main.py), as shown below:
Then click Yes.
Once the file is written, click OK to confirm and complete saving the MicroPython file to the K230 development board.
With this method, the K230 development board will automatically run the MicroPython file upon power-up without connection, enabling offline execution.
3.4.4 Program Outcome
Note
This lesson consists of two combined programs, where Video_Recording.py is the video recording program and Video_play.py is the video playback program.
Download the Video_Recording.py program. The program will start automatically and record a 5-second MP4 file (200 frames), which is then saved automatically. Next, download the Video_play.py program. When started, it will automatically play back the recorded MP4 file, and the program ends after playback completes.
3.4.5 Program Analysis
Video_Recording.py Program Analysis
Import MP4 and OS libraries.
from media.mp4format import *
import os
Configure MP4 Muxer.
def mp4_muxer_test():
print("mp4_muxer_test start")
width = 1280
height = 720
# Instantiate mp4 container
mp4_muxer = Mp4Container()
mp4_cfg = Mp4CfgStr(mp4_muxer.MP4_CONFIG_TYPE_MUXER)
if mp4_cfg.type == mp4_muxer.MP4_CONFIG_TYPE_MUXER:
file_name = "/sdcard/app/tests/test.mp4"
mp4_cfg.SetMuxerCfg(file_name, mp4_muxer.MP4_CODEC_ID_H265, width, height, mp4_muxer.MP4_CODEC_ID_G711U)
# Create mp4 muxer
mp4_muxer.Create(mp4_cfg)
# Start mp4 muxer
mp4_muxer.Start()
(1) Define input resolution width = 1280 height = 720.
(2) Instantiate mp4 container mp4_muxer = Mp4Container().
(3) Set output path file_name = "/sdcard/app/tests/test.mp4".
Create and start MUXER.
# Create mp4 muxer
mp4_muxer.Create(mp4_cfg)
# Start mp4 muxer
mp4_muxer.Start()
Prepare the MP4 muxing environment and begin writing data.
Process data writing.
frame_count = 0
try:
while True:
os.exitpoint()
# Process audio and video data, write to file in MP4 format
mp4_muxer.Process()
frame_count += 1
print("frame_count = ", frame_count)
if frame_count >= 200:
break
except BaseException as e:
print(e)
(1) os.exitpoint() is used to detect exit requests, ensuring the program can be safely interrupted.
(2) Call mp4_muxer.Process() in a loop to process audio and video data and write it to the file.
(3) if frame_count >= 200: Stops after writing 200 frames, equivalent to recording a short video clip.
Video_play.py Program Analysis
Import player module and OS library.
from media.player import * # Import player module for playing mp4 files
import os
Define playback completion callback.
start_play = False # Playback completion flag
def player_event(event,data):
global start_play
if(event == K_PLAYER_EVENT_EOF): # Playback completion flag
start_play = False # Set playback completion flag
When the player reaches the end of file (EOF), it sets start_play = False to end the waiting loop.
Define playback function.
def play_mp4_test(filename):
global start_play
player=Player() # Create player object
player.load(filename) # Load mp4 file
player.set_event_callback(player_event) # Set player event callback
player.start() # Start playback
start_play = True
(1) Create player object player=Player().
(2) Load mp4 file player.load(filename).
(3) Set player event callback player.set_event_callback(player_event).
(4) Start playback player.start().
(5) Modify playback completion flag start_play = True.
Allow user interruption or exception capture to ensure safe program exit.
try:
while(start_play):
time.sleep(0.1)
os.exitpoint()
except KeyboardInterrupt as e:
print("user stop: ", e)
except BaseException as e:
sys.print_exception(e)
player.stop() # Stop playback
print("play over")
Playback completion handling.
# Wait for playback to end
try:
while(start_play):
time.sleep(0.1)
os.exitpoint()
except KeyboardInterrupt as e:
print("user stop: ", e)
except BaseException as e:
sys.print_exception(e)
player.stop() # Stop playback
print("play over")
(1) After exiting the loop, call player.stop() to stop the player.
(2) Print play over to indicate playback is complete.
3.5 LVGL Experiment
3.5.1 Experiment Overview
This section demonstrates how to use the K230 to run programs with the LVGL graphical interface.
3.5.2 Preparation
Module Connection
Connect the K230 development board to your PC using a Type-C data cable, as shown below:
Double-click to open CanMV IDE K230.

Click the connection button in the lower left corner.

When connection is successful, the lower left corner of CanMV IDE will display the icon shown below.
If connection takes more than 10 seconds, it has failed. Click the Cancel button, and a dialog box will appear. Click OK and recheck the connection.
Note
Connection Failure Causes and Solutions:
Cable is not a data cable: Some Type-C cables are charging-only cables without data transfer capability. Please use a Type-C cable with data transfer functionality. The factory-supplied cable is a Type-C data cable.
Other K230 firmware was flashed: Re-flash the factory firmware, then reconnect.
3.5.3 Program Execution and Download
Display Mode Configuration:
The program can use the select_display="" parameter to choose the display mode: HDMI, LCD, or IDE virtual.

The K230 program supports two operation modes: online execution and offline execution.
Online Execution:
After connecting, drag the program Lvgl.py into the CanMV IDE K230 code editor, then click the run button  in the lower left corner to execute the program online, as shown below:
in the lower left corner to execute the program online, as shown below:
Note
Programs run using this method will be lost after disconnecting or powering off, and will not be saved on the development board.
Offline Execution:
After connecting, drag the program Lvgl.py from the same directory into the CanMV IDE K230 code editor, click Tools in the toolbar, and select Save open script to CanMV Board (as main.py), as shown below:
Then click Yes.
Once the file is written, click OK to confirm and complete saving the MicroPython file to the K230 development board.
With this method, the K230 development board will automatically run the MicroPython file upon power-up without connection, enabling offline execution.
3.5.4 Program Outcome
Run the program on the K230 platform to display English text and dynamic animations in the LVGL graphical interface.

3.5.5 Program Analysis
Import Audio, Media, and OS Libraries
from media.display import *
from media.media import *
import time, os, sys, gc
import lvgl as lv
import uos
Initialize LVGL
def lvgl_init(display_width, display_height):
"""Initialize LVGL"""
global disp_img1, disp_img2
lv.init()
disp_drv = lv.disp_create(display_width, display_height)
disp_drv.set_flush_cb(disp_drv_flush_cb)
disp_img1 = image.Image(display_width, display_height, image.ARGB8888)
disp_img2 = image.Image(display_width, display_height, image.ARGB8888)
disp_drv.set_draw_buffers(disp_img1.bytearray(), disp_img2.bytearray(),
disp_img1.size(), lv.DISP_RENDER_MODE.DIRECT)
Initialize LVGL and configure double buffering, create the display driver using disp_create(), and register the rendering callback with set_flush_cb().
Resource Management Function
def verify_resources():
"""Verify that all required resource files exist"""
required_files = {
"fonts": [
"font/montserrat-16.fnt",
"font/lv_font_simsun_16_cjk.fnt"
],
"images": [
"img/animimg001.png",
"img/animimg002.png",
"img/animimg003.png"
]
}
missing_files = []
Used to verify the integrity of fonts and image resources by iterating through the required_files list and attempting to open each file, counting the number of missing files.
Graphics Rendering Function
def disp_drv_flush_cb(disp_drv, area, color):
"""LVGL display flush callback"""
global disp_img1, disp_img2
if disp_drv.flush_is_last():
if disp_img1.virtaddr() == uctypes.addressof(color.__dereference__()):
Display.show_image(disp_img1)
else:
Display.show_image(disp_img2)
disp_drv.flush_ready()
LVGL render callback: when LVGL finishes updating the frame buffer, it determines the active buffer, calls the underlying show_image() to display it, and notifies LVGL that the refresh is complete.
User Interface Function
def user_gui_init():
"""Initialize user interface"""
print("\n=== Loading resources ===")
if not verify_resources():
print("Warning: Some resource files are missing, UI may be incomplete")
# Load fonts
font_montserrat = load_resource("font/montserrat-16.fnt", "font")
font_simsun = load_resource("font/lv_font_simsun_16_cjk.fnt", "font")
# Create text labels
if font_montserrat:
ltr_label = lv.label(lv.scr_act())
ltr_label.set_text("LVGL demo running...\nSystem is working properly")
ltr_label.set_style_text_font(font_montserrat, 0)
ltr_label.set_width(300)
ltr_label.align(lv.ALIGN.TOP_MID, 0, 20)
if font_simsun:
cz_label = lv.label(lv.scr_act())
cz_label.set_style_text_font(font_simsun, 0)
cz_label.set_text("hello hiwonder\nResource path: " + RESOURCE_PATH)
cz_label.set_width(300)
cz_label.align(lv.ALIGN.BOTTOM_MID, 0, -20)
Load font resources, create text labels, and initialize animation widgets.